

定义
海面监测的主要负责海洋环境监测、污染监测、生态监测及陆源入海污染物监测等的实时检测反馈,负责海洋环境和海洋生态监视、溢油指纹库和污损事件数据资料库的管理。海面监测对研究全球海洋环境保护、海洋生态保护与建设的规划和海洋环境标准;拟订重点海域排污总量控制标准和实施方案、海洋石油勘探开发重大海上溢油应急计划、海洋倾废评价程序和标准;开展赤潮、海冰等灾害的具有重要研究意义。
检测手段目前,遥感探测海面环境的主要手段是微波雷达和被动红外,微波雷达成像距离远,但在近距离处存在盲区;被动红外可弥补盲区目标探测,但只能获取目标红外辐射强度轮廓像,不能获取目标的距离信息,不能对目标进行空间位置评估;受海上环境影响较大,如目标的红外辐射特性与背景相近时,将极大影响成像对比度,探测率有待进一步提高。
条纹管激光成像雷达是一种先进的光电成像技术,它可同时提供反映目标材质信息的强度像和反映目标空间位置及表面结构信息的三维几何距离像,统称为四维像。1
成像雷达近程海面监测基本原理条纹管激光成像雷达是闪光式体制的,可一次成像,并能高速获取目标四维像数据。该雷达依据瞬态光学中高精度微弱信号测量原理,使用条纹管作为成像雷达的四维像探测器,其工作原理如图所示。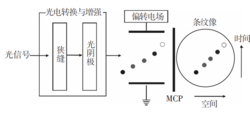
光学系统将回波光信号的像成在狭缝上,狭缝取出的一维空间信息通过中继透镜成像在变像管的光电阴极上。当光电阴极上的狭缝部分被光脉冲照明时,将发射光电子,其瞬态发射密度正比于该时刻的光脉冲强度,因此光电阴极发出的电子脉冲在时空结构上是入射光脉冲的复制品。电子脉冲经静电聚焦系统聚焦后,进入偏转系统。偏转系统上加有随时间线性变化的斜坡电压,由于不同时刻进入偏转系统的电子受到不同偏转电压的作用,按照脉冲到达的时间先后顺序,经MCP(微通道板)放大后到达荧光屏。在荧光屏上将沿垂直于狭缝的方向展开,这一方向对应于时间轴,可以得到沿狭缝每一点展开的时间信息,重构后便可以得到回波信号所对应的距离信息,即目标的距离像。1
研究现状条纹管激光成像雷达(streaktu beimaginglidar,STIL)是21世纪初美国提出并试验演示了的一种新型非扫描闪光式激光成像雷达,采用高探测灵敏度的条纹管作为四维像探测器,海洋透过“窗口”532nm绿光激光为光源,利用条纹管快速探测器对不同时间到来的光子偏转差异,实现三维空间信息和强度信息的获取,成功地演示了水雷探测、海底地形地貌勘探等实验,并做到了小型化。
2000年前后,美国国家海洋管理局(NOAA)与AreteAssociate联合利用条纹管激光成像雷达,成功地实现了大范围海下水雷搜索、海底地貌,并很快装配于直升机和潜艇上,使这种体制的激光雷达在地貌勘察、海洋监测等领域进入实用阶段。2004年,已经有条纹管激光成像雷达进行实际演练的报道
随后,美国将该技术引入到机载遥感成像中,公布了机载条纹管激光成像雷达航拍试验结果[8],通过推扫成像方式,获取了高分辨的地面建筑物场景三维距离像,见图所示。1
优点由国外实验报道可以看出,条纹管激光成像雷达在大视场条件下,能获得高分辨及高探测灵敏度的激光强度像和距离像,特别是距离像,能获取场景目标空间位置关系和目标表面空间结构,这极大简化了复杂场景中目标分割提取的算法复杂度,因此具有较高的目标探测识别概率,这非常有利于在近程海面成像监测过程中高效检测场景内目标,这是目前被动红外成像体制所不具备的。
激光成像雷达的优势在于高空间分辨率和距离分辨率,其劣势在于不能远距离成像。目前国际上一般能获得3km的激光四维像。条纹管激光雷达由于采用高探测灵敏度条纹管为探测器,可将成像距离提高到5km左右,这极大地扩展了激光雷达的应用范围,也能满足近程海面监测的需求。并且随着技术的进一步发展,获得更远距离的激光四维像也是指日可待的。1
应用分析通过分析条纹管激光成像雷达自身特点,如下条件使条纹管激光成像雷达具备满足近程海面监测的需求:
(1)高探测灵敏度:条纹管探测其内部有MCP,能对微弱信号进行放大,使探测器具有极高的探测灵敏度,有利于完成远距离探测;
(2)高距离分辨率:偏转系统能提高距离分辨率,使条纹管的距离分辨率达到厘米量级,测距精度高;
(3)大视场成像:条纹管激光雷达的像元数与光阴极材料线对数和尺寸有关,一般线对数为25l.p./mm,对Φ17mm光阴极来讲,其像元数为1×425,因此可做到大视场和高空间分辨率。1
卫星测高技术监测海平面卫星测高数据可以几公里到几十公里以及近于全球的空间采样分辨率和覆盖率,以及几天到十几天的时间采样重复率,填补全球海岸以外广阔海洋潮汐观测的空白,提供丰富的海平面变化信息和平均海面全球精细结构以及海洋流场时空变化信息。目前,T/P和ERS2测高卫星在星载GPS定位和最新的JGM-3和EGM全球重力场模型的支持下,测高精度已达到cm级,因此卫星测高技术已成为监测海平面变化的重要手段之一。2
研究海潮信息该项研究利用的TOPEX/Poseidon卫星测高数据是由法国空间研究中心CNES提供的综合地球物理数据记录(MergedGeophysicalData Records,简称MGDR),该数据包括了TOPEX/ Poseidon的雷达测高数据及相应的改正参考值。卫星测高技术观测的是卫星到瞬时海面的光行时,经过大气对流层延迟、电离层延迟改正后得到卫星到瞬时海面的距离。根据卫星的精密星历和参考面模型(可选择为参考椭球面、大地水准面或平均海平面)就可以计算出瞬时海面相对于参考面的高度,在进行潮汐、固体潮和极潮等地球物理项的改正就可以计算出平均海面高度。
卫星测高资料中包含了海冰和部分陆地的观测数据,在剔除这些资料后,还应考虑由于高度计等星载仪器异常而导致的观测异常,对此,MGDR提供了数据质量控制的标准。处理用上述标准外,本项工作增加了测高海面高度相对于平均海平面高模型值偏差的标准。该值包含了轨道、潮汐、仪器等各种改正模型的误差和随机噪声,一般情况下不超过±1m。卫星飞行过程中,特别是当从陆地进入海洋上空时,可能会出现高度计失锁,这时,计算得到的相对于平均海平面模型的海面高度会出现很大的异常,有时达到几十米,但根据其他质控标准又不能将其剔除,故以±3m的标准控制这种测高计异常现象。2
研究ElNino过程每隔2~7年,南美太平洋沿岸的海水表面温度将出现异常的增暖,一般比常年增高5°~6°,这就是ElNino事件。ElNino事件一般持续一年以上,在这期间伴随着大尺度的海洋和大气活动异常,对全球的气候变化产生影响。在1982~1983年期间发生了那次较强的ElNino事件后,分别于1986~1987年,1991~1992年,1993年和1994~1995年都出现过较弱的ElNino的产生机制和对全球气候的影响过程。
海洋测高卫星的测高精度为±2cm~±3cm,加上其他地球物理模型的改正误差,测量海面高度的精度可以达到±5cm左右。一般在TOPEX卫星观测的2个月后可得到它的观测数据。因此利用这一资料,可以近实时地监测全球海平面的变化。
当利用TOPEX观测数据计算相对于参考椭球的海面高时,使用的改正模型与表1所列大致相同,仅参考面从大地水准面改为参考椭球面,极潮模型改用Applied模型。
TOPEX卫星采用严格重复轨道,其重复周期为9.9156天。对每个重复周期内的数据先后进行经度方向和纬度方向内插以得到1°×1°的海面高度值。对这一数据进行时间平均得到月平均的海面高度值。为了更好地看出海面高度的变化情况,在上述数据中扣除正常年份(即无厄尔尼诺年份,如1995年)平均的海平面高度值,从而得到相对于1995年度平均值的海面高数据。2
研究海平面季节性变化本项研究利用了7年的TOPEX/Poseidon数据(第9周期至249周期),由共线法研究了全球海平面和中国海域海平面季节性变化。
T/P数据使用了AVISO最新处理的第三版本光盘,编辑标准除以AVISO使用手册的准则之外,还采用了OSU(Rapp等1994)的编辑标准。地球物理改正采用了干对流层改正、湿对流层改正、TOPEX双频电离层改正和DORIS电离层改正分别用于TOPEX和Poseidon数据中,海洋状态(K1)改正,以及海潮(CSR3.0)、固体潮和极潮改正,逆气压改正采用了第一周期平均大气压计算的改正数。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国