

线性系统是指同时满足叠加性与均匀性(又称为其次性)的系统。所谓叠加性是指当几个输入信号共同作用于系统时,总的输出等于每个输入单独作用时产生的输出之和;均匀性是指当输入信号增大若干倍时,输出也相应增大同样的倍数。对于线性连续控制系统,可以用线性的微分方程来表示。不满足叠加性和均匀性的系统即为非线性系统。1
由于线性系统较容易处理,许多时候会将系统理想化或简化为线性系统。线性系统常应用在自动控制理论、信号处理及电信上。像无线通讯讯号在介质中的传播就可以用线性系统来模拟。
变参数系统根据系统是否含有参数随时间变化的元件,自动控制系统可分为时变系统与定常系统两大类。
定常系统又称为时不变系统,其特点是: 描述系统运动的微分或差分方程,其系数均为常数;在物理上它代表结构和参数都不随时间变化的这一类系统;反映在系统特性上,系统的响应特性只取决于输入信号的形状和系统的特性,而与输入信号施加的时刻无关。若系统在输入r(t)作用下的响应为y(t) ,当输入延迟一时间τ,则系统的响应也延迟同一时间τ且形状保持不变。定常系统的这种基本特性给分析研究带来了很大的方便。
如果系统的参数或结构是随时间而变化的,则称为时变系统,也称为变参数系统。例如火箭或带钢卷筒控制系统,在运行过程中随着燃料不断地消耗或卷筒卷绕带钢后直径的变化,使得系统的质量或惯性随时间而变化,故它们属于时变系统。 时变系统的特点是: 由于系统的参数或结构是随时间变化的,描述系统运动的方程为时变方程;反映在特性上,系统的响应特性不仅取决于输入信号的形状和系统的特性,而且还与输入信号施加的时刻有关,这给系统的分析研究带来了困难。
在自动控制理论中内容丰富且便于实用的是定常系统部分,而时变系统理论尚不够成熟。虽然严格说来,在运行过程中由于各种因素的作用,要使实际系统的参数完全不变是不可能的,定常系统只是时变系统的一种理想化模型。但是,只要参数的时变过程比之系统的运动过程慢得多,则用定常系统来描述实际系统所造成的误差就很小,这在工程上是容许的。
线性变参数系统简介线性变系数系统也称为线性时变系统。其特点是,表征系统动态过程的线性微分方程或差分方程中,至少包含一个参数为随时间变化的函数。在现实世界中,由于系统外部和内部的原因,参数的变化是不可避免的,因此严格地说几乎所有系统都属于时变系统的范畴。但是,从研究的角度,只要参数随时间的变化远慢于系统状态随时间的变化,那么就可将系统按时不变系统来研究,由此而导致的误差完全可达到忽略不计的程度。2
线性时不变系统和线性时变系统在系统描述上的这种区别,既决定了两者在运动状态特性上的实质性差别,也决定了两者在分析和综合方法的复杂程度上的重要差别。事实上,比之线性时不变系统,对线性时变系统的研究要远为复杂得多,也远为不成熟得多。
对于线性系统,通常还可进一步分为线性时不变系统和线性时变系统。
线性时不变系统线性时不变系统也称为线性定常系统或线性常系数系数,其特点是,描述系统动态过程的线性微分方程或差分方程中,每个系数都不随时间变化的常数。从实际的观点而言,线性时不变系统也是实际系统的一种理想化模型,实质上是对实际系统经过近似化和工程化处理后所导出的一类理想化系统。但是,由于线性时不变系统在研究上的简便性和基础性,并且为数很多的实际系统都可以在一定范围内足够精确地用线性时不变系统来代表,因此自然地成为线性系统理论中的主要研究对象。
线性时变系统的表示状态方程n维线性时变系统的状态方程为:
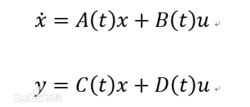
其中,u是p维输入向量,y是q维输出向量。A、B、C、D分别是线性系统的参数,均是时间t的函数,即参数随时间的变化 变化。
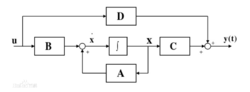
结构图线性时变系统的结构图如下:
对于线性时变系统,当t0时刻其x值为x0,在定义时间[t0,t1]时间内,状态完全能控的充要条件是Gram矩阵

非奇异。式中Φ(t,t0)为时变系统状态转移矩阵。
推论1(秩判据):
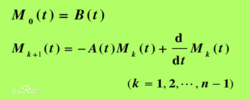
假设矩阵A(t)和B(t)都是n-1此连续可微的,在时间区间[t0,t1]上,若有

则系统状态完全能控,其中分块矩阵
推论2(秩判据):
假设矩阵A(t)和B(t)都是n-1此连续可微的,在时间区间 上是n-1次连续可微的,若对初始时刻
上是n-1次连续可微的,若对初始时刻 ,存在有限时刻
,存在有限时刻 ,
, ,使得
,使得

则系统在时刻t0是状态完全能控的,其中分块矩阵
线性时变系统

在定义时间[t0,t1]时间内,状态完全能观的充要条件是Gram矩阵

为非奇异。
推论1(秩判据):
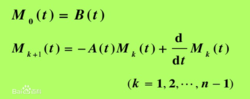
假设矩阵A(t)和C(t)都是n-1次连续可微的,在时间区间[t0,t1]上,又有
则系统是状态完全能观的,其中分块矩阵3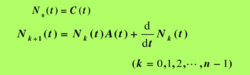
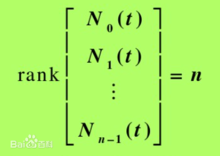
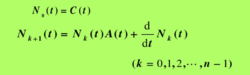
推论2(秩判据):
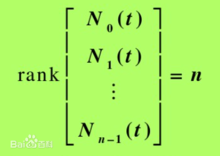 对于连续时间线性时变系统,假设矩阵A(t)和C(t)都是n-1阶连续可导的函数矩阵,则系统在时刻t0状态完全能观的充要条件为:在一个有限时刻,使得
对于连续时间线性时变系统,假设矩阵A(t)和C(t)都是n-1阶连续可导的函数矩阵,则系统在时刻t0状态完全能观的充要条件为:在一个有限时刻,使得
则系统是状态完全能观的,其中分块矩阵
稳定性是设计控制系统的最基本要求。4
线性时变系统方程:

如果已经求出矩阵A(t)的所有特征值,系统渐近稳定的充要条件是:A(t)的所的特征值都位于S的左半平面。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国