

无人机发展概述概述
无人机(UAV,Unmanned Aircral Vehicle)也称无人航空器或遥控驾驶航空器,是一种由无线电遥控设备控制,或由预编程序操纵的非载人飞行器,拥有众多有人驾驶飞机所不具有的优点,可执行各种作战和训练保障等任务,具有广阔的军事应用前景。
无人机的迅猛发展只有几十年的历史,先是美国在越南战争中使用无人机作为靶机进行训练,后来使用无人机照相侦察胡志明小道。在1982年黎巴嫩战争中,以色列将无人机用于实战,以军用无人机作火力侦察。后来在
海湾战争中美国开始大量使用无人机,主要用作侦察机、电子干扰机、炮兵目标引导机和靶机等角色。近年来,美军在阿富汗开始使用无人机,攻击“恐怖分子’’车队,并获得很大的战果,多名塔利班的高级军官在攻击中死亡。
目前,世界上已经有32个国家研制出了50多种无人机,有55个国家装备了无人机。在无人战斗机的研制上,美国走在最前面,已经开发出空军与海军的验证机。波音公司是美国的主要无人机制造商之一。进入21世纪以来,随着新型无人机种——无人作战飞机的发展,无人机将不再是过去在战场上主要充当辅助角色的情况,在过去,无人机主要是执行空中侦察、战场监视和战斗毁伤评估等任务,现在升级成为能执行防空系统、对地攻击,甚至可以执行对空作战的任务。无人机不仅会在未来的战场上与有人战斗机协同并肩作战,而且会在某些条件下可能代替有人战斗机执行危险的作战任务,从而可能会成为未来空中作战的主力航空武器装备。无人作战飞机的出现具有非常重要的战略意义,可能会导致未来空中作战的组织编制、作战原则、条例条令、战术思想乃至装备采购策略等方面的一些重大变革1。
无人机的特点目前,有人驾驶的战斗机、攻击机等是空中作战与对敌攻击的主要力量。随着空战武器以及一体化防空系统的迅速发展,光靠有人驾驶飞机在未来的战场中执行空中格斗、对地攻击的任务,所要冒的风险更大,付出的代价更高,战争损耗与政治风险将越来越难以承受。为此,世界各国已经着手研究和评估无人机的军事效用和在战场中的实战价值,并投巨资探索各种方案,发展各类无人作战飞机。无人作战飞机具有以下特点:
1.以任务为中心设计,不必考虑人的因素。
2.无人机本身结构简单,但系统复杂。
3.无人机可在危险环境中作战。
4.无人机的使用费用相对较低。
5.无人机的续航能力强。
6.人员零伤亡1。
航迹跟踪控制系统发展概述概述无人机的航迹跟踪控制,主要通过无人机的飞行控制系统来实现。无人机之所以能发挥如此巨大的作用,除了在气动力、结构以及发动机方面取得了重大突破外,在现在无人机上安装有各种不同功能的飞行控制系统也是至关重要的。飞行控制系统一般由不同功能的分系统或部件组成,能够控制无人机重心运动(航迹运动)、角运动和飞行速度等,并能改善无人机飞行品质与保障无人机的飞行安全。其基本功能是实现无人机的自动飞行,改善无人机的动态性能。
一般来说,无人机的性能和飞行品质是由无人机的本身气动特性和发动机特性决定的。但随着无人机飞行高度以及速度的增加,无人机的自身特性会变坏。如无人机在高空飞行时,由于空气稀薄,阻尼特性变坏,致使无人机角运动产生严重的摆动,此外,设计无人机时,为了减少质量和阻力,提高升力,常将其设计成静不稳定的,所以,对于这种静不稳定的无人机,要安装不同类型的控制系统以改变无人机的性能。
这样,如何通过调节无人机的飞行控制系统来使无人机能够更好更快的跟踪预定航迹,即通过无人机模型的建立来设计飞行控制系统,进而研究无人机的航迹跟踪控制,对无人机整体性能的提高以及航空事业的发展都有很重要的意义。
发展历史及国内外现状1903年12月以来,美国莱特兄弟成功实现了人类首次有人驾驶飞机飞行,飞行控制系统与飞行控制技术经历了百余年的飞速发展历程。从早期的由拉杆、摇臂或钢索、滑轮等组成的简单机械式飞行控制系统,到现代飞机的数字式光/电传飞行控制系统。
1912年,美国的斯派雷公司研制了第一台驾驶仪——电动陀螺稳定装置,开创了自动飞行控制的先河。该装置由两个双自由度陀螺,磁离合器以及用空气涡轮驱动的执行机构组成,用以保持飞机稳定平飞。但那时候仅仅是保持飞机稳定的飞行,而对于机动性能的要求还不是很高。
到第二次世界大战后期,无人驾驶飞行器——导弹问世。二战后,飞机自动驾驶仪也逐渐与机上其他装置耦合以控制各种航迹。
20世纪50年代前,驾驶仪主要用于运输机的简单飞行控制。20世纪60年代,驾驶仪功能得以扩展,发展成自动控制系统。
之后,数字计算机和仿真技术的迅速发展,促进了控制理论与制导技术在机载数字计算机的运用,进而使飞行控制技术得到了迅速发展,产生了随控布局飞行器设计的思想,在设计飞机之初就考虑自动控制,达到气动布局、飞机结构设计、发动机设计以及自动控制四个方面的协调配合,设计出性能更好的飞机。
20世纪80年代后,飞行控制系统经历了由模拟式系统向数字式系统的过渡,采用主动控制技术的电传飞行控制系统也进入了实验阶段。完成了“四轴侧杆控制"、“综合飞行/推进控制一、“光传操纵系统在飞机上的验证”等工
作。20世纪90年代又验证了“先进数字/光学控制系统”、“飞行/推进/火力综合控制系统"等多项主动控制技术。
含有主动控制功能的电传飞行控制技术的应用,使飞行控制系统成为保证飞机性能、任务能力和飞行安全的关键系统。飞机飞行控制系统功能的不断增强,交联关系更加复杂,与推进系统、导航系统等的不断集成与综合,并且随着机载电子技术、控制技术等的提高,这样的综合还将不断发展与提高。今后的飞机飞控系统必将向着数字化、综合化的方向不断的发展。
我国飞行控制系统的发展也是经历了从常规机械操纵,到驾驶仪、增稳与控制增稳、自动着陆、带机械备份的电传控制与不带机械备份的全时全权限数字电传系统的研发过程。经过我国航空事业的发展,我们已经取得了很大的成绩,各种新型的飞行控制系统已经在新型飞机上陆续投入使用,但是我国飞机的飞行控制系统以及飞机的机动性能上与美国、俄罗斯等发达国家的差距还是有的,还需要进一步提升我国的航空技术水平,推动我国航空事业的进一步发展1。
控制器总体结构在对现有先进飞控技术进行深入了解和研究的基础上,同时考虑到无人机的特点和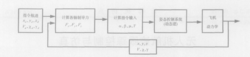 功能需求,提出如图所示制导和姿态控制分别进行设计的机动航迹跟踪控制方案。
功能需求,提出如图所示制导和姿态控制分别进行设计的机动航迹跟踪控制方案。
采用六自由度非线性飞机方程为模型,将指令航迹信号(包括三个位置信号( )与三个速度信号 (
)与三个速度信号 ( ))与及指令信号和实际状态之间的误差通过求解制导力
))与及指令信号和实际状态之间的误差通过求解制导力 ,再转换成攻角α,侧滑角β,航迹滚转角μ以及推力T等指令信号作为姿态回路的输入指令。而姿态控制系统采用较为成熟的动态逆方法设计快逆和慢逆回路,能满足机动飞行的要求。
,再转换成攻角α,侧滑角β,航迹滚转角μ以及推力T等指令信号作为姿态回路的输入指令。而姿态控制系统采用较为成熟的动态逆方法设计快逆和慢逆回路,能满足机动飞行的要求。
飞行航迹跟踪控制的最终目的是使飞机以足够的准确度保持或跟踪预定的飞行航迹 。控制飞行器运动航迹的系统称为制导系统 。若飞行器偏离给定航迹,制导装置将测出其偏差,并以一定的控制规律控制角运动,使飞机以要求的准确度回到给定的航迹 。飞机重心运动可分为沿垂直方向 、切线方向和侧向偏离 3 种 。侧向的偏离一般通过飞机倾斜转弯的方式来修正,一般不希望产生侧滑,侧向偏离控制以滚转角的控制作为基础 。垂直方向的偏离通过控制攻角来修正 。而航迹切线方向的偏离则通过控制发动机改变推力从而改变速度来修正 。制导力由两部分组成,一部分是飞机作期望机动动作所需要的力 。另一部分就是消除制导误差所需要的力,包括位置误差,速度误差和水平航迹角和垂直航迹角误差2。
控制器也可以采用PID控制,包括经典的PID控制以及近些年发展起来的智能控制。经典的PID控制主要以其算法比较简单、容易实现、具有很高的可靠性等特点而在无人机控制系统中得到广泛应用。但随着人工智能学科
的发展,智能控制也越来越受实际控制系统的欢迎,成为控制发展的新的方向。并且将人工智能的方法与传统PID相结合,取其各自优点,而形成的新的PID控制器,大大改善了传统PID控制的性能。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国