

所谓位置自动控制就是在指定的时刻,将被控对象的位置自动地调节到预先给定的目标值上,调节后的位置与目标值之差保持在允许的误差范围内,这个调节过程称为位置自动控制(APC)。APC在现代化轧线上得到了极其广泛的应用,国内新建的某热连轧线上,包括粗轧立辊、精轧压下、弯辊、窜辊、卷取侧导板、夹送辊、助卷辊等都采用了液压APC系统进行控制。液压伺服控制系统的经典控制理论是在20世纪50年代初由美国麻省理工学院开始研究,到60年代初形成了其基本类型。经典控制理论采用基于工作点附近的增量线性化模型对系统进行分析与综合,设计过程主要在频域中进行,控制器的形式主要为滞后、超前网络和PID控制等1。
板厚精度作为板带材最主要的质量指标之一,其控制水平在很大程度上决定了板带材的质量。液压自动位置控制(APC)系统是板厚自动控制系统的基础和核心,其作用就是精确地控制压下位移以得到所需的辊缝,是整个厚度控制系统的执行终端。因此,APC系统能否正常稳定地工作,决定着板厚控制系统能否顺利投入2。
液压APC控制系统模型构成液压APC系统的主要元件,包括电液伺服阀、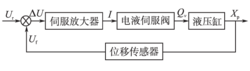 液压缸、轧机辊系、位移传感器,其控制原理如图1所示。
液压缸、轧机辊系、位移传感器,其控制原理如图1所示。
伺服放大器的频宽比电液伺服阀的频宽高得多,响应速度很快,可不计时间常数,近似为比例放大环节,表示为:
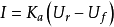
式中:I 为伺服放大器输出电流,A;Ka为伺服放大器的增益;Ur为给定电压信号,V;Uf为位移传感器输出的位移反馈信号,V。
电液伺服阀电液伺服阀的响应特性由系统的频宽来决定。当液压执行机构的固有频率 低于 50Hz 时,伺服阀的动态特性一般可用一阶环节表示:
低于 50Hz 时,伺服阀的动态特性一般可用一阶环节表示:
 当液压执行机构的固有频率高于50 Hz 时,可用二阶环节表示,即:
当液压执行机构的固有频率高于50 Hz 时,可用二阶环节表示,即:
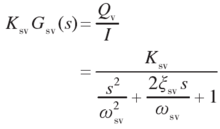
式中:Gsv为Ksv=1 时的伺服阀传递函数;Qv为伺服阀流量, ;Ksv为伺服阀增益系数,
;Ksv为伺服阀增益系数, ;
; 为伺服阀的固有频率,rad/s;ξsv为伺服阀的阻尼系数。
为伺服阀的固有频率,rad/s;ξsv为伺服阀的阻尼系数。
利用液压控制阀的流量方程、液压缸流量连续性方程、液压缸和负载的力平衡方程,采用质量、弹簧和阻尼结构的系统,可导出液压缸的传递函数为:
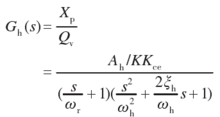
其中, 。式中:
。式中: 为惯性环节的转折频率;ξh为液压阻尼比;Kce为总流量压力系数,
为惯性环节的转折频率;ξh为液压阻尼比;Kce为总流量压力系数, ;K 为弹性负载的综合刚度,N/m;Ah为液压缸的有效面积,m2;
;K 为弹性负载的综合刚度,N/m;Ah为液压缸的有效面积,m2; 为液压固有频率。
为液压固有频率。
位移传感器在系统中可视为惯性环节,即:

式中:Xp为液压缸输出位移;Kf为位移传感器的位移电压转换系数;Tf为位移传感器的时间常数,s。考虑到位移传感器的固有频率远高于液压系统的固有频率,可得到位移传感器的简化模型2:

考虑到伺服阀的频率远高于液压系统频率,因此可以把伺服阀当成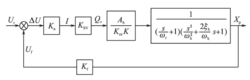 一个比例环节,即Qsv:
一个比例环节,即Qsv:

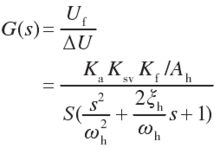
液压APC的闭环控制系统简化方框图如图2所示。将活塞负载压力设为零,且忽略弹性负载,即K=0,可得液压APC系统的开环传递函数2:

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国