

研究背景
IC 制造业是关系到国家命运的基础性产业,是国民经济发展中极其重要的一个支柱性产业 ,它几乎存在于所有工业领域,这些领域包括:电气工程领域、机械制造领域、航天领域和国防领域等。IC 制造业的发展甚至决定一个国家竞争实力和装备水平,欧美、日本和韩国等国家都把 IC 制造业作为国家发展的战略性产业,美国半导体咨询委员会在国情咨文中称其为“生死攸关的工业”,韩国称其为“工业粮食”,一些发达国家GDP 增长的 60%~70%与以集成电路为代表的电子产业有关2。
,它几乎存在于所有工业领域,这些领域包括:电气工程领域、机械制造领域、航天领域和国防领域等。IC 制造业的发展甚至决定一个国家竞争实力和装备水平,欧美、日本和韩国等国家都把 IC 制造业作为国家发展的战略性产业,美国半导体咨询委员会在国情咨文中称其为“生死攸关的工业”,韩国称其为“工业粮食”,一些发达国家GDP 增长的 60%~70%与以集成电路为代表的电子产业有关2。
由于我国在 IC 制造业起步较晚,整体科技水平落后,加之发达国家对我国在芯片制造核心技术、关键设备、IP 核和关键原材料等方面技术封锁,使我国的芯片生产水平仍然与欧美及日本等发达国家有十分大的差距,落后上述国家 3-5 代。近几年,我国对 IC 制造业的发展也加大了力度,首先,随着我国“中国芯”产业化进程加快,我国 IC 制造业面临着难得的发展机遇和挑战。其次,我国在“中国制造 2025 规划”的高档数控机床和机器人领域中,重点提到了基础制造装备及 IC 制造业的发展规划。此外,IC 制造业的发展还具有非常重要的战略意义,因此,IC 制造业的研发和生产制造受到了世界各国日益重视。
IC 制造业的核心技术是光刻机设备的发展,目前世界上有三大光刻机生产商:荷兰 ASML、日本 NIKON和 CANON 公司,掌握绝大数光刻机专利,其中,ASML 公司光刻机代表着国际最先进的技术水平,该公司最先进的 Twinscan光刻机采用双工件台技术,其中工件台和掩模台是光刻机系统最为关键的子系统,两者主要完成光刻机系统调整对焦和扫描曝光等功能,其关键技术涉及精密机械加工、精密测量、运动控制和驱动控制等技术。 光刻机技术发展的核心指标为晶圆尺寸、线宽和产品率,其中线宽决定了集成电路的复杂度和功能密度1。
超精密定位运动控制系统特点(1)超精密定位运动控制系统是一个多交叉学科的研究领域,从目前来看主要包括机械、光学、电气、控制和测量等领域,而大多数学者都将研究重点放在超精密定位平台、支撑结构和运动控制策略上。
(2)根据光刻机系统中音圈电机工况特点和功率放大器指标来看,无论采用线性功率放大器还是开关功率放大器,都难于使音圈电机功率放大器同时达到高功率、高精度和高带宽的指标要求。
(3)音圈电机数学建模方面集中在由支撑结构引起扰动建模,包括摩擦力和推力波动建模,其扰动频率较低,采用前馈查表和建立复杂数学模型等方法补偿扰动来提高定位精度。当音圈电机在高频下运动时,其表现出的各种非线性特性相对比较复杂,难于建立精确数学模型。
(4)在超精密定位运动控制系统中,通常以提高信号跟踪能力、克服内外干扰、抑制系统振动和缩短定位稳定时间为控制目标,很难找到一种全面的控制策略,通常是几种控制算法相互配合,互补不足来最终实现3。
音圈电机工作原理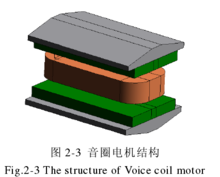
音圈电机是一种特殊形式的直流直线电机,其具有高频响、高加速度、体积小和控制方便等优点,由于这些优点,音圈电机能够解决精度与速度和大行程之间矛盾问题。近年来,随着超精密定位系统性能指标的提高,导致音圈电机技术迅速发展,不仅在半导体制造装备、高档数控机床和光学电子显微镜等超精密定位系统中得到广泛应用,还在医疗、振动平台和主动减振系统等高激励运动系统中运用4。
音圈电机(voice coil motor,VCM)是一种基于安培力原理设计的直线电机,如图所示,主要由永磁体、线圈和轭板 3 部分组成。其原理为当通电线圈在气隙磁场中运动时,根据洛伦兹力原理,则会产生推力驱动线圈在气隙内沿轴向运动,随着线圈中电流方向和数值的变化,线圈做往返直线运动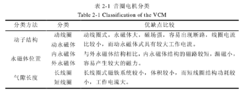 。除了和其他直线电机一样可消除传动环节中存在间隙等不足外,在理论上音圈电机具有高响应、高加速度、结构简单和力特性好等优点,广泛应用于高频激励、高响应和高精度定位运动控制系统中。
。除了和其他直线电机一样可消除传动环节中存在间隙等不足外,在理论上音圈电机具有高响应、高加速度、结构简单和力特性好等优点,广泛应用于高频激励、高响应和高精度定位运动控制系统中。
根据音圈电机永磁体所处的位置不同,分为内永磁体式和外永磁体式;根据音圈气隙长度,分为长线圈和短线圈结构;根据动子结构,分为动线圈 式和动永磁体式,各个种类音圈电机优缺点对比如表所示。
式和动永磁体式,各个种类音圈电机优缺点对比如表所示。
通过对表中各个性能比较可以得出,为了满足音圈电机高加速度、快速响应和高频响的运动特性,在运动部件质量一定的条件下,应该选择内永磁体式、动永磁体式和短线圈式结构的音圈电机,此种类型的音圈电机具有功耗小、工作电流大和推力大等优点。
音圈电机高精度轨迹跟踪控制策略研究在扫描运动中,音圈电机按照已规划运动指令运动,属于高精度轨迹跟踪运动控制(Trajectory tracking control),其运动控制目标:音圈电机始终跟踪目标轨迹运动,并且在运动过程中尽量保证运动轨迹的跟踪误差最小,与此同时,为了减小运动过程中高加减速对机械系统的冲击,指令轨迹规划也是实现高精度轨迹跟踪技术的关键技术。对于高精度轨迹跟踪运动控制来说,负载扰动、电阻电感变化、电机非线性以及机械振动等因素都可能使伺服系统性能变坏,因此,对控制系统的鲁棒性提出了更高的要求,采用自抗扰控制和5阶S型曲线相结合的控制方式,实现高精度轨迹跟踪控制1。
高精度运动轨迹规划
在现代超精密数控加工系统、机器人系统和光刻机系统中,通常其控制系统都以实现高加速度和高速度运动为目标。然而,频繁高加速度突变会引起系统振荡,对机械系统产生冲击,无法使控制对象快速和精确定位。
指令轨迹规划能够使轨迹加速度曲线变的平滑连续,可以减小高加速对机械系统的冲击,其中S型轨迹规划是一种常用的指令轨迹规划方法,广泛应用在实际工程中,其设计准则:
(1)根据电机运动工况需求和一些约束条件,其约束条件包括最优调节时间、最小功耗和最小加速度等;
(2)在满足以上约束条件的前提下,计算出各自的限制值和时间切换点;
(3)最后,依次积分求得加速度、速度和位移随时间变化的曲线。
自抗扰控制策略研究
传统PID控制算法的原理:根据控制目标与被控输出之间的误差、误差微分及误差积分的加权和来生成控制量,该控制算法至今仍在控制实践工程中被大量采用,然而,在高精度运动控制领域,传统PID控制器难于满足超精密定位系统的控制目标要求。韩京清教授提出了一种自抗扰控制(Active Disturbance Rejection Control,ADRC)算法,在保持PID不依赖于数学模型基础上,对传统PID控制方法进行改进,包括如下几点:
(1)根据设定值预先安排合适的过渡过程。
(2)误差微分信号通过跟踪微分器和状态观测器来提取。
(3)在非线性领域寻找更合适的P、I和D组合来改进误差反馈规律。
(4)采用扩张状态观测器估计扰动总和并进行实时补偿。
通过上述4方面对传统PID控制算法的改进,ADRC控制算法具有算法简单、鲁棒性强、易于数字化和参数调节方便等优点。目前,ADRC算法已被成功应用在机器人高速高精度控制、永磁同步电机调速控制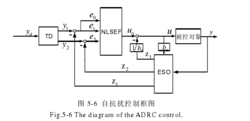 和DC-DC功率变换器控制等诸多领域。
和DC-DC功率变换器控制等诸多领域。
ADRC控制器主要由三部分组成:跟踪微分器(Tracking-Differentiator,TD)、扩张状态观测器(Extended State Observer,ESO)和非线性状态误差反馈(Nonlinear State Error Feedback,NLSEF),其控制框图如图所示。
1)跟踪微分器(TD)
跟踪微分器的作用对目标值安排过渡过程,当指令信号为阶跃信号时,由于被控对象惯性环节的存在,在跟踪起始阶段存在大误差,为了加快跟踪效果,势必加大控制增益,从而产生较大的超调量。为了降低初始误差,设计一个合理过渡过程,同时给出过渡过程的微分信号,使系统跟踪事先安排好的过渡过程曲线,能够有效地减少超调量,从而提高控制系统性能。
2)扩张状态观测器(ESO)
自抗扰控制器核心部分为扩张状态观测器,其不依赖具体数学模型,也不需要直接去测量,把控制系统中的“内扰”和“外扰”看成总扰动,利用“扩张状态观测器”估计出实时扰动量并加以补偿。
3)非线性状态误差反馈(NLSEF)
传统PID控制形式为P、I和D的线性组合,这种线性组合并不是最佳组合,韩京清教授提出了一种非线性PID控制器,充分利用非线性函数特性,实现“小误差大增益,大误差小增益”1。
音圈电机高精度点对点定位控制策略在定位运动中,音圈电机根据偏转角计算位置误差进行定位补偿,其运动方式属于高精度点对点定位运动控制(Point-to-point positioning control),其运动控制目标:音圈电机实现点对点精确定位,只关注响应时间以及目标位置的定位精度,其运动伺服控制系统应具有快速响应、无超调量和鲁棒性强等特点,通常快速响应和无超调量是一对相互制约的指标。
为了解决快速性和超调量的矛盾,有学者首先提出复合非线性反馈控制策略(CNF),该控制策略包括线性部分和非线性部分,线性部分通过减小系统阻尼来提高系统的响应速度,而非线性部分使电机在临近目标点时逐渐加大系统阻尼来抑制超调量的产生。有学者将复合非线性反馈控制算法拓展至输出反馈控制。然而,上述控制策略只适用于定常参考指令跟踪,不能满足时变参考跟踪控制,为此,辅助信号发生器被引入到CNF中,解决时变输入跟踪控制。针对多变量饱和线性系统时变参考输入跟踪问题,一种推广的组合非线性反馈控制被提出。
针对复合非线性反馈控制对参数扰动和负载扰动自适应差的问题,模型自适应补偿算法加入到该算法中,有效提高系统鲁棒性1。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国