

主从控制研究现状
随着目前机器人机械手的应用越来越广泛,需要面对与处理的情况越来越复杂,即便科技已高度发达,但是要其完全独立的处理这些复杂任务仍是一个非常有挑战性的工作。正是在这种情况下,主从控制充分将人的高度智能、强大的学习能力用于机械手的任务规划及实时处理之中。国内外的专家学者对其产生了浓厚的兴趣并进行了广泛的研究。比如在实际应用当中,像太空作业、核辐射工业、深海等极端环境不适合人类的实际操作,存在着温度极高、压强大、辐射强等危险,主从控制充分的结合了我们人的智能与机械的优越性能,广泛的应用于航空航天、假肢手的康复训练、深海作业、机器人排爆、假肢手的拟人化设计当中,以及在外科手术当中也引起了强烈的重视。假肢手的控制可以分为主从控制、自主控制及两者的结合控制。遥操作是当前主从控制的应用最广的方式。
随着科技的进步,人类的作业领域不断增大,常常需要人类在一些高危险或难以接近的环境中进行作业,因此研究开发能够主动适应环境变化的智能机器人代替人类进行这些作业具有重大的意义。主从操作机器人正是在这种需求下孕育发展起来。主从操作机器人从二十世纪六十年代出现,经过将近半个世纪的发展,己经取得了很大的成就,其成果己经广泛被运用于工业,民用的各个领域,并带来了巨大的经济效益,而且随着科学技术的进一步发展,它的应用前景将更加广阔。
遥操作机器人是指在人的操纵下能在人难以接近(距离遥远、对人有害或操作有难度)的环境中完成比较复杂的精细操作的一种远距离操作系统,而主从操作机器人是指以双向操作为主体的遥控机器人。主从操作机器人系统由以下几个部分组成:操作者、主手、从手、感知系统、控制系统等。主手由操作者直接控制,主手根据操作者的操作向在现场的从手发出指令,使从手进行作业,同时从手将现场的信息如视觉、触觉、听觉等通过传感器反馈回操作者。

迄今,绝大多数主从操作机器人的主手和从手的结构是相同的或者近似相同的,在医疗机器人领域也是如此。例如,美国NASA实验室的眼科手术机器人,日本东京大学研制的遥操作显微血管缝合机器人,均采用主从同构的结构形式。这种结构的优点是主从运动直观性强,运动控制简单,操作简单;但是,主从同构机器人的设计要同时兼顾主手和从手双方的特点,不能充分满足各自的需要。然而,在系统中引入计算机之后,主从同构机器人的这种不能满足各自需要的束缚就可以摆脱了。此时,主手和从手的设计可以分别按照各自的功能和特殊的要求来考虑,设计为结构上异构,而实际的操作控制可以达到同构效果的主从形式。
这种主从操作机器人,除了具有同构主从机器人的优点之外,一方面能够使主手完全适应操作者的需要,另一方面还能够使从手更好的完成操作任务,其技术难点往往在于如何实现其主从控制。在计算机飞速发展的今天,这种主从机器人的控制问题己经可以实现,因此,对于主从操作机器人来说,结构上的异构,而实际的操作控制可以达到同构效果得主从机器人是其研究与开发的方向。
从手设计则应当适应作业内容、作业负荷和作业环境的要求。随着主从操作机器人应用领域的不断扩大,从手的结构趋向于多样化。空间应用、水下天然气开采和某些核应用的从手往往是大型的、尺寸常远远大于主手,医学上使用的主从操作手通常尺寸较小,甚至是微型的。而主手可以直接选用商业主手产品,这样不仅利用现有产品提高了开发效率,同时商业主手人性化的设计也便于操作者的操作。
总之,主手和从手结构上的差异,扩大了主从操作机器人的应用范围和使用的方便性。在主从操作机器人的设计过程中,在硬件方面,在满足作业要求的前提下,主从结构框架应尽可能对应,自由度完全相同,运动方式基本对应;在控制系统方面,通过运动学方程实现运动的匹配映射。最终软硬件结合,实现异构结构达到同构的实际操作控制效果。
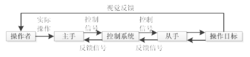
主从控制方式研究在高危和难以接近的环境中作业需要一种能够适应环境的智能机械体,主从操作机器人孕育而生,它是指以双向操作为主体的遥控机器人。主从操作系统由以下几部分组成:主控端、控制系统、从控端、反馈系统等,如图所示。操作者控制主手通过控制系统向从控端发出指令,从手跟随作业的同时向操作者反馈视觉、触觉、听觉等信息。视觉反馈能够将手术区域的信息反馈给医生,使其能够实时了解手术进程,为下一步操作提供信息。
微创手术机器人的控制一般采用主从控制方式,即医生通过操控主手机械臂,使从手机械臂复现医生的动作。该方式可以使医生坐在主控台旁进行远程手术,减轻了医生的体力消耗。主从式控制模式能够通过机械臂关节运动量传递医生的手部动作,直接映射到从手机械臂完成手术动作。通过设置主从运动的行程映射比例,可实现医生对复杂手术的精确操作。该种控制方式要求从手机械臂具有较高的灵活性和可控性,这对从手机械臂的构型具有一定的要求。
根据主手和从手的构型,可分为主从同构型和主从异构型。同构型即主手和从手的结构完全相同,只在尺寸上有所区别。该种方式的控制模式较为简单,主从映射易实现,便于从手末端点位置和姿态的控制;缺点是主手参照从手设计,通用性较差,且操作者很难以舒适的姿势进行长时间操作,不符合人因工程学。主从异构型即主手和从手结构相异,主手采用独立设计。该种方式的优点是主手设计不受限制,既增加了通用性,又满足了人因工程学相关要求;缺点是控制较为复杂,需要实时求解主从系统的正逆运动学甚至动力学。
对于主手系统的研究,最具代表性的有美国华盛顿大学研制的FREG(Force Feedback Endoscopic Surgical Grasper);美国Sensible Technologies公司研制的PHANTOM主手;还有Iwata实验室研究的Iwata主手。FREG系统的特点在于主手和从手上均装有位置传感器和驱动器,可以调节从手的夹持力。PHANTOM系统的特点在于主手具有单向力反馈功能,即只能由操作对象进行力信息反馈,不能由操作者对操作对象施加操作力。Iwata系统的特点在于其主手构型采用并联机构,同时能够感知力反馈信息。
机器人运动控制要求机器人能够按照预定的控制指令和控制方式执行相应运动。常用的运动控制方式有三种:笛卡尔空间控制方式、关节空间控制方式、逆雅可比控制方式。在笛卡尔空间控制方式中,需要建立主从手笛卡尔空间坐标系之间的对应关系,将主手的运动信息传递至从手的笛卡尔空间中,根据正、逆运动学求解出关节的位置信息。该种控制方式适用于主从异构模型,在实际控制中还需实时调节主手对从手的不同行程映射系数。在关节空间控制方式中,主手各关节的运行信息一一对应的传递至从手各关节,其适用于主从同构式控制模型。逆雅可比控制方式,实质是对机器人进行速度控制,根据主手末端点的速度信息经过逆雅可比矩阵求解,得到从手各关节的速度信息。该种控制方式等效于笛卡尔空间控制方式,在某些层面上,两者可以相互结合,使得控制更加精确。
主从控制设计的要求主从控制,即建立主手和从手之间的映射关系,并根据此映射关系设计相应的控制方法实现主手对从手的完全控制。对于主从控制的研究主要集中于几个方面:一是主手和从手装置的配置,即结构组成,如果主手和从手之间的结构具有较高的相似度,则为同构配置;如果主手和从手装置的结构不同,关节及运动关系存在较大差异,则为异构形式;二是对主从映射方式的研究,根据主从手的结构配置来制定相应的映射方式,分别增量映射和绝对映射,前者是将主手的各自由度的变化量转换为从手的控制量实现控制,后者是实现从手对主手的各自由度的绝对位置跟踪;三是根据建立好的映射方式,通过设计相应的控制方法或策略来实现主从控制,以实现主手对从手的精确控制和完全控制。
对主从控制设计及实现过程提出以下几点要求:
(1)要求主从映射方式清晰且直观,符合医生的操作习惯,使医生更快理解并掌握,能够减轻操作者的工作量或减化操作流程,进而更有效且更快捷地进行导管介入操作。
(2)要求通过控制主从控制方式能够代替传统的人手操作方式,并能实现人手操作方式下的所有的导管介入操作,包括对导管的推\拉、弯曲\回复和旋转,即从手各自由度运动均可由主手控制实现。
(3)要求主从控制方式有安全保护考虑,即包括介入装置的位置限位,也包括导管的弯曲角度限位,防止因不当操作可能引起的不良后果。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国