

意义
交叉口是城市道路网络中的关键位置,虽然单个交叉口的交通信号控制是被运用最为广泛的控制方式,但其更适合于孤立的交叉路口。对于整个城市从宏观的角度来看,实行区域交通信号协调控制对于提高交通运输效率和减少车辆的平均延误有着不可替代的作用。区域交通信号协调控制的目的是在充分利用现有交通设旌的基础上,以先进的控制技术为手段为依托,对区域内多交叉口交通信号进行协调控制,减少目标区域内交通拥堵和交通事故的数量,尽量提高区域内交通运输效率,缓解区域内交叉口的交通流压力。本文将采用一些现代智能控制技术来优化城市交通控制问题,提高交通控制系统的控制效果,使其能够适应不同的交通环境。制定科学的交通管理办法和高效可行的信号控制方案能够降低交通事故的发生、改善交通环境、提高道路的交通运输效率及降低能源消耗,同时对提高人民的生活质量和城市经济建设水平也有着重大的推动作用1。
结构大量的研究和实践表明,整个城市道路交通网络的运行可以通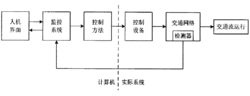 过计算机网络来进行控制,这已经在世界各地的很多城市得到了广泛的应用,区域交通信号控制系统也是建立在这种体系下的。如图1就是一个基本的基于计算机控制的交通系统体系结构。
过计算机网络来进行控制,这已经在世界各地的很多城市得到了广泛的应用,区域交通信号控制系统也是建立在这种体系下的。如图1就是一个基本的基于计算机控制的交通系统体系结构。
基于经典控制技术理论,交通控制系统可描述为一个反馈的闭环控制系统。系统的输入对应于来自人机界面交互的人工需求的输入,输出对应于实际交通网络中运行的交通流,反馈信息则是来自实际交通网络中检测器所获取的交通信息。对于区域交通信号控制,实际交通网络与控制设备包括面向整个区域的和面向单个交通节点(交叉路口或者路段)的多个层次的处理设施。整个区域交通信号控制系统就是在这种体系结构的基础上运行的。
显然,在这样的自动控制系统中,最核心的就是对监控系统获得的检测信息进行实时响应,并通过控制输入反馈到控制设备上的部分,也就是将输入信息转化为输出信息的控制方法环节(具体表现为计算机控制算法)2。
区域交通控制方式分类城市区域多交叉口交通控制的方式有多种,一般可按控制策略分类、按控制结构分类。
以控制策略分类(1)区域交通定时式离线控制方法:这种方法以区域内交通流量的历史统计数据和现状调查数据作为基础,用计算机进行离线计算优化处理,从而获得最佳的信号配时方案,配时方案会存入控制计算机中以供信号控制机在不同的交通情况下选择,这种方法适用于交通流量相对稳定的区域路网。
(2)区域交通适应式在线控制方法:这种方法以设置在区域路网中的车辆检测器收集到的实时交通流量数据为基础,进行联机在线计算优化处理,这种方法能够很好的适应交通流的随机变化。
以控制结构分类(2)区域交通集中式计算机控制结构方法:这种方法将区域内所有的信号机都连接成一个网络,用一台中小型计算机或是多台计算机在线联网的方式对整个系统进行集中控制,属于主从分布式控制方法,其原理与结构都很简单。
(2)区域交通分层式计算机控制结构方法:这种方法将整个交通信号控制系统分成上下层两个子系统,上层子系统接收来自下层子系统的交叉口配时方案,对这些配时方案从整体的角度进行协调分析处理,从而使下层子系统的配时方案得到修正;下层子系统则根据修正后的方案再做必要的调整。上层子系统主要完成整个系统协调优化任务,下层子系统主要完成区域内交叉口配时调节的执行任务1。
区域交通信号控制方法根据控制方式的不同,交通信号控制可以分为定时控制方法与自适应控制方法两类。
定时控制方法定时控制方法指的是根据给定的过去一段时间区间内的历史需求选取合适的优化算法,并以离线驱动的方式对交通信号进行控制的方法。该方法是最早实现的交通信号控制方式。由于技术条件的限制,早期采用人工调整信号灯变化的单路口交通信号控制就是一种简单的定时控制方式。随着道路交通检测技术的进步,根据历史交通信息来对交叉路口实行控制的单路口定时控制方法获得了越来越多的关注,其中最著名的是SIGSET和SIGCAP方法。出于区域交通网络控制的需求,20世纪六、七十年代以来,在单路口定时控制方法的基础上,发达国家的研究机构研制出了多种区域交通信号定时控制方法,其中应用最广泛的就是J.D.C.Little提出的MAXBAND和由D.I.Robertson提出的TRANSYT两种方法。下面分别介绍这两种方法。
(1)MAXBAND是一种干线信号控制方法,它的主要研究对象是一条带有n组交通信号灯(有n个交叉路口)的双向主干道,通过设定合适的相位差,使得以给定的速度运行的车辆的数量达到最优,同时减少这些车辆在交叉路口的等待时间,形成所谓的“绿波带”。在包括J.D.C.Little在内的各国学者的努力下,基于基本的MAXBAND思想已经衍生出了很多扩展方法,例如考虑车辆的左转运行、不同支路的带宽等等,这些方法统称为MULTIBAND。
(2)TRANSYT是英国道路与交通研究所(TRRL)在1966年推出的一套离线交通信号优化配时程序,由于其良好的优化效果,还经常被用作研究交通信号控制的对照方法。TRANSYT主要是通过一种迭代的方式来对交通参数进行优化:对于给定的信号灯控制参数(也就是系统的控制输入,包括周期、绿信比和相位差等等),动态网络模型计算出相应的响应指数,然后采用一种启发式“hill-climb”优化算法对这几个控制参数值进行优化,并导出新的运行模型,不断进行迭代计算,直到系统性能达到最优。经过几十年的发展和完善,RANSYT目前的最新版本是ll版,而美国、法国等国家的研究机构也在TRANSYT的基础上改进研究出了相应的控制系统。
自适应控制方法与定时控制方法相似,自适应控制方法最早也是从单路口自适应控制方法开始的。但是,由于多个交叉路口之间关联度的复杂性,区域自适应控制方法远比单路口自适应控制方法复杂。因此,目前国际上研制出的具有实用性的区域自适应控制方法不多,其中最具代表性的就是SCOOT和SCATS两套系统。
(1)SCOOT(Split,Cycleand Offset OptimizmionTechnique,绿信比、周期和相位差优化技术)是由英国TRRI,的D.I.Robertson团队在TRANSYT系统的基础上研发的交通控制系统【261。SCOOT的核心算法与TRANSYT基本相同,二者的差别主要在于对交通状态的交化是否实时响应。SCOOT是一种基于模型的优化控制方法,系统对所控制的交通网络建立模型,并根据车辆检测器获取的实时交通信息来优化求解出最合适的交通信号控制参数,从而实现对交通网络自适应协调控制的目标。类似的基于模型的交通控制优化方法还有OPAC,RHODES,CRONOS等。由于这些方法是以数学模型为基础,系统稳定性较好,然而随着交通网络的扩大,模型的复杂度会呈指数级数增长,系统的计算复杂度也会相应的增大,这是此类系统的缺点。
(2)SCATS(Sydney Coordinated AdaptiveTrafficSystem,悉尼协调自适应交通系统)是澳大利亚新南威尔士州道路交通局(RTA)历时十年时间研究开发的实时自适应交通信号控制系统。与SCOOT不同,SCATS是一种没有交通模型的方案生成式自适应交通控制系统。SCATS系统中预先设置了多种交通信号控制方案,在实际运行过程中,系统根据检测到的实时交通信息来选择一种合适的控制方案。SCATS将系统结构分为三层,分别是中央控制中心、子区控制中心和路口信号控制机。这种分层控制的方式加上灵活的控制方案选择方式,大大提高了系统的运行效率,使得SCATS系统可以对整个区域交通网络取得非常好的协调控制效果,也因此成为了应用最广泛的区域交通信号控制系统。目前我国上海、广州、香港等城市的交通信号管理就是采用SCATS系统实现的2。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国