

所谓反推,可简单理解为:最终控制信号通过一系列“虚拟”信号以递归的方式得到,虚拟信号事实上无需通过硬件,可直接经由计算得到,故可简化控制器的结构;递归的每一步只需要处理一个相对简单的误差系统,从而可较灵活地选择控制信号,有效改善过渡过程品质。1
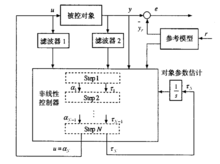
线性系统反推自适应控制定常线性系统的反推自适应控制理论研究以Krstic等的著名论文2为起点,取得了一些较好的结果。图1给出了文献2反推自适应方案的基本结构,其中,被控对象相对阶为 ,
, 为对象输出,
为对象输出, 为参考模型输出,
为参考模型输出, 为参考模型输入,最终控制信号
为参考模型输入,最终控制信号 通过虚拟控制信号及调参律
通过虚拟控制信号及调参律 以递归方式一步步得到。事实上,在反推控制律设计中,棘手的是如何处理对虚拟控制信号的微分问题。而文献2的核心,正是巧妙地提出了一种构造Lyapunov函数的方法,避开了对信号的微分。1
以递归方式一步步得到。事实上,在反推控制律设计中,棘手的是如何处理对虚拟控制信号的微分问题。而文献2的核心,正是巧妙地提出了一种构造Lyapunov函数的方法,避开了对信号的微分。1
由于放弃了确定性等价原则和规范化调参律,文献2所设计的反推自适应控制器较传统自适应控制器具有如下优点:
(1)可显著改善系统跟踪误差的过渡过程品质,给出了系统跟踪误差 性能指标与设计参数间的明确关系;当高频增益确切已知的情况下,可给出系统跟踪误差
性能指标与设计参数间的明确关系;当高频增益确切已知的情况下,可给出系统跟踪误差 性能指标与设计参数间的明确关系,从而为改善跟踪精度指出了具体途径。
性能指标与设计参数间的明确关系,从而为改善跟踪精度指出了具体途径。
(2)削弱了调参律对系统的影响。
(3)在无调参律的情况下,反推控制对参数不确定性仍具有一定的鲁棒性。
非线性系统反推自适应控制由于更加贴近工程实际,非线性系统的自适应控制始终是控制理论中最具吸引力的研究方向。自从文献E33首先就一类非线性系统提出反推自适应控制方案以来,对非线性系统的反推自适应控制研究取得了多方面的进展。
下面介绍严格反馈非线性系统的反推自适应控制方案。
基本的非线性反推方案设计过程为:考虑参数化严格反馈系统





其中, 为状态,
为状态, 为控制,
为控制, 为未知的常参数矢量,
为未知的常参数矢量, 和
和
 为光滑函数且对于任意的 ,
为光滑函数且对于任意的 ,
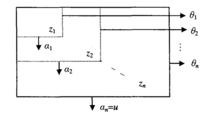
基本思想是采用递归方法设计控制器,将某些状态变量视为“虚拟控制”并设计控制律:首先将上式的第1个等式视为一个独立的子系统,定义误差变量 ,虚拟控制
,虚拟控制 用来稳定第1个等式。由于参数
用来稳定第1个等式。由于参数 未知,采用自适应方法来完成该任务,则此时的控制器包含控制律
未知,采用自适应方法来完成该任务,则此时的控制器包含控制律 以及调参律
以及调参律 ;由于
;由于 并非最终的实际控制,反推的下一步定义误差变量
并非最终的实际控制,反推的下一步定义误差变量 ,虚拟控制
,虚拟控制 则用来稳定包含第1、第2个等式的子系统。接下来的设计类似,在每一步中产生一新的控制律和新的调参律,最后一个控制信号
则用来稳定包含第1、第2个等式的子系统。接下来的设计类似,在每一步中产生一新的控制律和新的调参律,最后一个控制信号 则为最终控制
则为最终控制 。图2给出了该方法的大致设计过程。
。图2给出了该方法的大致设计过程。
上述方案的主要优点在于:
(1)仍然基于Lyapunov方法,但克服了传统方法“匹配条件”的束缚;
(2)对参数化严格反馈非线性系统,解决了全局稳定和跟踪收敛的难题;
(3)当参数未知时,传统的反馈线性化设计方法会抵消系统中有用非线性特性,而反推自适应则较为灵活,可通过增加附加非线性项来改善系统过渡过程性能。
调节函数方案显然,上述基本反推自适应方法对同样的参数 进行了
进行了 次估计,文献3采用调节函数方案克服了这种过参数化的缺点。调节函数方案可以视为基本反推自适应方案的更高级形式。以第1步为例,反推一开始,该方案并非将 视为调参律,而仅视为“调节函数”;调节函数
次估计,文献3采用调节函数方案克服了这种过参数化的缺点。调节函数方案可以视为基本反推自适应方案的更高级形式。以第1步为例,反推一开始,该方案并非将 视为调参律,而仅视为“调节函数”;调节函数 在后面的递归设计中将被用到,它与调参律问的误差
在后面的递归设计中将被用到,它与调参律问的误差 可通过增加控制器的附加项来补偿。除继承了基本反推方案的优点外,调节函数方案还可使自适应控制器的动态阶数最小,同时也使状态和参数估计收敛到的集合的维数最小。
可通过增加控制器的附加项来补偿。除继承了基本反推方案的优点外,调节函数方案还可使自适应控制器的动态阶数最小,同时也使状态和参数估计收敛到的集合的维数最小。
调节函数方案尽管拥有许多优点,但也存在下述缺点:
(1)调参律设计没有太大的选择余地;
(2)虽然调节函数控制器的阶数是最小的,但对于高阶系统,由于与辨识器之间的相互作用,控制律的非线性表达变得非常复杂。
为克服上述缺点,文献3还提出了一种模块化设计方案。该方案在反推自适应的基础上,借用了线性系统设计的一些传统方法,即令辨识器模块设计和控制器模块设计相互独立。该文献首先分析了将线性系统方法引入非线性系统时所遇到的主要障碍:除非对系统非线性特性加以严格限制,上述控制器不能实现辨识器和控制器的分离。进而,提出了一类具有较强鲁棒性的控制器,即所谓的ISS控制器。该类控制器不仅对常参数误差,而且对时变参数估计均可保证信号的有界性,从而使ISS控制器能够适用于模块化的非线性反推自适应设计。此外,它还提出一类SG控制器,采用了类似于线性系统中的小增益性质。SG控制器减少了ISS控制器的非线性复杂性,但同时也降低了其过渡过程性能。
应用研究航空航天领域1995年,Richard等人4首先讨论了导弹纵向运动控制器的反推控制方案;文献5对某复杂高性能飞机设计了反推自适应飞行控制律并进行了仿真研究,结果表明:即使存在较大的模型误差,甚至在飞机某个平尾失效的情况下,反推自适应控制律都展现出了快速的收敛性和良好的鲁棒性;6对飞控系统的反推自适应控制进行了初步研究,比较了不同的飞控设计方法(模糊控制、反推自适应控制、变结构控制、非线性动态逆控制、间接自适应控制等),结果表明,反推方法在未来飞控系统设计中具有突出优点;7采用神经网络和反推自适应相结合的方法讨论了飞行控制器的设计问题;8则讨论了反推方法在航空发动机控制等设计中的应用。
其他工业控制领域除航空航天领域外,在液压控制、电机控制、机器人控制、船舶控制等许多工业控制领域,反推自适应控制的应用在国内外均有大量报道。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国