

机器人自适应能力的局限性是进一步推广现代工业机器人的主要障碍。自适应机器人的主要特点是具有自我调整功能,可适应本身或是环境变化。与传统机器人相比,这一关键性的进步就是设计的机器人在完全不需要控制辅助的情况下进行自我调整。
在一段示范中,拆下自适应机器人四条腿中的一条,机器人会来回摇摆,并激活两个倾斜传感器,“觉察到”突变的情况。随后机器人自己利用仿真软件,建立一个虚拟模型,并采用该模型来测试在“残废”情况下新的漫步方式。一旦虚拟的测试获得成功,机器人就会采用同样方式进行真正的行走。1
研究背景随着自动化技术的迅速发展,机器人愈来愈广泛地应用于工业生产过程中,尤其是在柔性制造系统(FMS)和工厂白动化(FA)中,机器人的作用得到了充分的认识,成为现代化生产不可缺少的工具。而生产应用的进一步深入又对机器人在精度、速度以及效率等方面提出了更高的要求。目前,工业中大多数机器人都采用常规的PID算法,因是建立在对机器人的动态模型确切了解的基础上,故在速度和精度要求不太高的情况下是完全可行的。
但是,实际中的机器人动态模型不可能精确知道,它是具有较强祸合的非线性系统,作为简单的线性系统来处理,在许多情况下不能获得理想的控制性能。为此,许多专家积极寻求新的机器人控制方法,一些控制理论的最新成果也被应用到这一领域,机器人的控制系统向智能化、精确化方向发展。
另一方面,计算机技术的发展也为这种应用创造了条件,从而促进了机器人的控制技术的进一步发展。针对机器人模型参数不确定的特点,自适应控制是公认的一种比较有效的办法。近年来,国际上已有许多这方面有益的尝试,提出了一些控制方案,如Dubowsky,Kiovo,Lee和Chun等人提出的几种自适应或自校正方案。但是,他们的方案往往忽略了各关节之间的祸合性或没有保证充分收敛性,因而仅限于一些较特殊的场合。
一般说来,自适应控制可以分为三类:模型参考自适应控制(MRAC);自校正控制(STAC);线性摄动自适应控制(LPAC)。这三种方法从不同角度去考察系统的不同方面,具有不同的特点,适用于不同的场合。2
自适应控制方法在模型参数不确切的情况下,控制将产生伺服误差。为了克服这种现象,我们在常规控制的基础上应用自适应控制,即施以两种控制,一是用常规控制将机器人的实际轨迹控制在期望轨迹的某一邻域内,另一是基于摄动模型的Lyapunov直接方法的自适应控制,由它进一步调节,使运动轨迹以渐近方式趋于望期轨迹。
n关节机器人的动力学模型可以表达成下列的状态空间方程的形式

其中
T(t)是施加力矩;I是参数向量。设Zd(t)是在Td(t)作用下的期望状态,Id是期望的参数向量。根据上面的讨论,假定经过常规的调节之后,实际轨迹在期望轨迹的某一5邻域内,因此,可以对式应用Taylor级数展式,以得到下列方程

 其中,dZ=Z-Zd,dT=T-Td,dI=I-Id
其中,dZ=Z-Zd,dT=T-Td,dI=I-Id
令X=dZ,U=dT,![]() ,,
,,
A(t),B(t)和d(t)是决定于各关节的速度、位置的时变矩阵,若动态模型参数以一定的速度更新修正,则在一定的时间间隔内,可将摄动系统视为一个时不变系统,即

选择自适应调节器的结构形式为

F(t),G(t)和h(t)是具有相同维数的矩阵,将由下而的自适应律来调整,闭环的摄动动态系统则成为

对给定的正定对称矩阵Q,选择对称正定矩阵P以满足下列Ricati方程

并且选择自适应增益矩阵T1,T2,T3是对称正定的,这时,自适应律即为



在上述自适应律的作用下, 摄动系统是渐近稳定的, 系统的结构如图所示。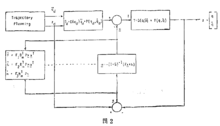
随着机器人的工作速度和精度越来越高,所面临的工作环境也越来越复杂,促使各国学者把现代控制理论应用到机器人运动控制领域,以解决高度非线性的控制问题。这些控制技术主要包括最优控制、随机控制、自适应控制、模糊控制和神经网络控制等。机器人运动过程中,所面对的环境对象非常复杂,往往不能建立起精确的数学模型来具体地描述它。实践证明,最优控制和随机控制往往不能保证机器人运动控制的最佳特性,显得效果不十分明显。但自适应控制、模糊控制和人工神经网络控制有适应系统变化的能力,尤其是后两种方法,在本质上可以实现非线性控制。3
具体方案是否能实时、灵活地避开障碍物是衡量机器人运动性能的一条关键指标。对于机器人来说,在运动过程中是否能快速、准确地对周围环境作出反应,比如避开前进中的障碍物并且不间断的移动到目的地,是非常重要的。在过去数年中有许多人提出各种各样的方法来解决这个难题。最近几年,有许多障碍规避的算法是建立在人工神经网络和模糊逻辑控制上的,并且有了相当大的成果。但考虑到神经网络的学习收敛性差以及模糊逻辑控制的控制规则过多的缺点,应用模糊神经控制技术,提出了一种新型的控制算法来实现机器人运动控制的实时、准确的规避障碍。这种方法主要通过应用一定量的模糊规则与神经聚类网络的结合,设计了一种启发式的模糊神经控制网络,并且通过对该模糊神经网络进行离线的非监督式训练,从而建立起传感器输入信号和机器人运动速度之间的模式映射关系。相对于一般的运动环境,该算法提供给机器人较为迅速的反应能力,从而实现机器人连续、快速的规避障碍。
为了使机器人在运动过程中,对障碍物具有迅速的反应能力,必须在传感器输入数据与控制输出之间建立良好的映射关系。但是考虑到这种关系是非常复杂与非线性的,如果只用到平常的控制方法去解决这个问题将有一定的难度。然而人工神经网络却具有惊人的处理非线性关系的能力,利用人工神经网络的这种优点来完成映射关系的成功建立。运动控制系统的结构,如图所示。它主要包含两个部分:左边这部分是神经聚类网络;右边这部分主要负责速度输出的计算。设计的运动控制系统共有五个输入传感器。3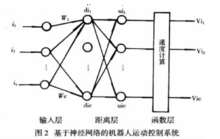
神经聚类网络结构具有模式识别的功能,它含有三层,依次为输入层、距离层和隶属函数层。作为一种模式聚类的网络,通过训练,每一种聚类就可对映一种原型模式。在此网络中,所有的原型模式对映于距离层中相应的权值向量Wj(1≤j≤c)。采用自组织特征映射的算法来确定权值向量Wj以及原型模式的个数c。
首先需要建立训练样本数据库,为了得出该模式聚类网络的权值参数,即得到各种类型的聚类形式,从而得出每一种障碍物的类型,必须通过建立合理的样本训练库对该网络进行训练。训练库中的数据虽然可以是无规则的,但是为了使训练过程更清晰和有效,将反映机器人运动时,当前感知环境的期望类别分为9类。
分别用序号代表不同的感知环境:(1)为前方有障碍物;(2)为前方与右前方有障碍物;(3)为前方与左前方有障碍物;(4)为无障碍物;(5)为右方有障碍物;(6)为左方有障碍物;(7)为左方、左前方与前方有障碍物;(8)为右方、右前方与前方有障碍物;(9)为左方与右方有障碍物。根据实际设计中机器人传感器的测距范围(5cm~150cm)和机器人自身的结构尺寸,得出反映机器人当前感知环境期望类别的期望特征向量(输入向量),该期望特征向量组成用于训练神经网络的训练样本数据库。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国