

飞机的稳定性和操纵性是飞机飞行品质特性中一对基本的矛盾,一般的增稳系统不可能从根本上解决这一矛盾。为了在提高飞机稳定性的同时,也提高飞机的操纵性,必须采用飞机控制增稳系统。它与增稳系统本质的区别在于在增稳系统的基础上,增设了杆力或杆位移指令信号的前馈线路,使杆力和杆位移信号经增强和调整送至舵机,去操纵舵面,达到改善对驾驶杆操纵特性的目的。这时原机械系统与此前馈线路并联在助力器前。1
飞机控制增稳系统是在增稳系统的基础上加入驾驶杆力传感器和指令模型,将飞行员的操纵指令与飞机的响应构成闭环的飞行控制系统。系统参数的选取一直是设计控制增稳系统的重要一环,它直接决定了控制系统的控制效果。对于一般的控制系统,跟踪精度和时域性能指标已经成为选择系统参数的重要依据。但对于飞行控制系统,飞行品质准则是飞行控制系统重要的评价指标。
基本原理控制增稳系统的基本原理是通过内回路反馈作用,提高飞机的稳定性和抗外界干扰的能力;通过前馈作用放大和调整杆指令信号,提高增稳飞机的操纵性,从根本上解决稳定性和操纵性之间的矛盾。1
优点1、能较好地解决了飞机稳定性与操作性之间的矛盾,克服了增稳操纵系统的所有缺点。
2、能有实现杆指令与飞机响应之间的任何静动态关系,也能实现驾驶杆的任何启动力要求。
3、这种系统中的机械杆系可设计的简单一些,只要保证飞行安全即可。
4、由于驾驶员的操纵信号可通过两个通道传输至舵面。这样在系统设计和调整中提供了操纵信号分配的灵活性。考虑到理想的操纵系统特性,不依赖于机械杆系本身的特性,通常只要改变电气部件的增益和时间常数,能容易地变化操纵系统的特性。
5、为提高飞机机动性、放宽静稳定度要求、设计新型的高性能飞机提供了可靠性。
系统结构控制增稳系统有多种设计方案,其中高增益控制增稳系统在飞机上使用最早。这种系统的设计原理同自动控制学中随动系统的设计思想完全一致。
图中(a)为一般增稳系统的结构方块图;(b)为控制增稳系统的结构图。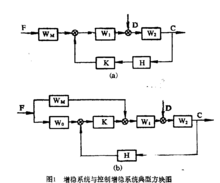
在图中:W1为助力器传递函数;
W2为飞机某一运动量对舵面偏度的传递函数;
WM为机械系统前段的传递函数;
W0为前馈电信号传递函数;
K为系统主放大系数,忽略舵机的动态特性;
H为敏感元件及其校正回路的传递函数;
F为输入量,如杆力或杆位移等;
C为输出量,即飞机的运动量,如迎角a,过载n,,俯仰角速率伽等;
D为飞机受到的可能干扰力或力矩,对于一般的增稳系统,有
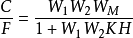
设H=1,当系统主放大系数K很大时

因为WM由机械系统决定,不可能设计得很大,故式(1)成立。这表明稳定性增加的同时,操纵性降低。
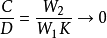
而对于图(b)的控制增稳系统,在上述条件下则有
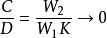
比较式1和式2可见,增稳系统与控制增稳系统在提高飞机稳定性和提高抗千扰能力方面是一致的;但是,对于控制增稳系统,可以通过重新设计前馈环节W0的特性来“任意”改善飞机的操纵性。这就是高增益控制增稳系统的基本思想。
飞机控制增稳系统参数估计在进行飞机控制增稳系统参数估计时,首先选取特定的区间Ψ,在区间内取n个与待估参数物理意义相同的数Kn,对于飞行控制系统的参数Kn设计不宜过大,因为过大的参数可能导致系统的增益过大,而且如果某一信号出现故障,大的参数会导致放大误差,使控制信号的误差更大。将Kn代入控制律模型,求出此刻系统的闭环传递函数,再利用低阶等效系统将系统的闭环传递函数等效成式的形式。取足够小的正数ε,利用低阶等效系统求出相应的飞行品质Hn与相应的飞行品质边界Bn比较,如果有 成立,则认为此参数Kn为满足飞行品质Hn的边届。
成立,则认为此参数Kn为满足飞行品质Hn的边届。
如果不能满足式的要求,则放大Ψ的区间,继续寻找。这样就可以确定某一飞行品质的参数边界,利用得到的参数边界进行数据拟合,可以得到参数边界曲线。最后通过若干飞行品质确定的边界曲线的交集得到可选参数区域。
控制增稳系统参数设计的流程图如图。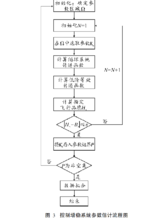
可以得到如下结论:
1)飞行品质误差较低的情况下,搜索算法确定的参数集合不连续,需要不断地扩大参数区域。设计合理的参数区域Ψ和误差ε,有利于参数集合的确定。
2)仅仅通过放大并不能使参数更连续,反而可能使飞行品质误差放大。
3)搜索算法与利用经验公式相结合,可以使确定的参数区域更精确和更方便。2
飞行品质规范准则对于一般的控制系统,跟踪精度和时域性能指标已经成为选择系统参数的重要依据。但对于飞行控制系统,飞行品质准则是飞行控制系统重要的评价指标。
飞行品质规范是为了保证飞机能安全飞行和具有良好的飞行品质,在飞机及相应的操纵系统或电传系统设计、生产、地面试验和试飞过程中必须要遵循的指导性文件。
长周期模态和短周期模态飞行品质规范要求以空速和俯仰姿态为特征的长周期模态响应,其任何长于15s的振荡,其等效阻尼ξn2应满足一级品质ξn2>0.04。对于以俯仰角速率和法向过载为特征的短周期模态响应,其等效阻尼比ξn1应在0.35到1.3之间。2
带宽准则该准则是由规定的开环系统带宽及时间延迟τ0的相互关系定义的。图为系统的开环频域响应。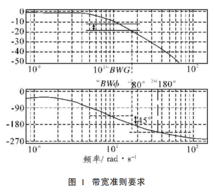
图中,ωBw是频域响应带宽,它是俯仰姿态对驾驶员操纵杆力或操纵位移的开环频率响应中,相位裕度大于45°或增益裕度大于等于6dB所对应频率中的较小者。时间延迟τp由下式定义:
τp=-(Φ2ω180+180°)/(57.3×2ω180)
式中,ω180为相角为-180°时所对应的频率,2ω180为频率为Φ2ω180时对应的相角。利用式就可以计算延迟时间τp。而飞行品质对于A种飞行阶段ωBw和τP的一级品质要求为:ωBw>6.5,τp6dB,相位裕度PM>45°。2
Gibson时域准则除了经典的像超调量和调整时间等时域性能指标外,Gibson准则也是评价时域响应的重要准则,Drb值是评价飞机的姿态、航迹控制性能的主要参数。它可以通过俯仰角和俯仰角速率时域响应来计算。2
现在对纵向飞行的品质规范的要求的边界做一个总结:飞行品质:一级品质规范;短周期频率:0.7

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国