

简介定义
自旋稳定控制是姿态控制方式之一,另一种是三轴稳定控制。自旋稳定的控制目的明确,具有推力偏斜和偏心对姿态控制影响小等优点,与三轴稳定控制相比,更适合于变轨姿态控制。采用自旋稳定姿态控制的航天器,其变轨过程包括自由飞行和变轨发动机工作两种状态。
自旋稳定姿态控制一般可分为主动和被动两种方式。被动控制利用章动阻尼器,通过增加航天器的自旋稳定性来稳定自旋轴。其优点是结构简单、节省能源;缺点是只适合于粗短体,无法控制细长体,只能进行姿态稳定,无法进行姿态机动,控制精度较低。主动控制利用姿控喷管控制航天器纵轴的姿态,可克服被动控制的上述缺点,控制精度较高。但须先解决姿态运动模型中存在的较强交连耦合、自旋轴姿态无法直接控制、考虑能量耗散时细长体的自旋不稳定等问题。1
发展历史从六十年代到七十年代初,自旋稳定方案在静止通信卫星领域占有垄断地位,Intelsat—Ⅰ~Ⅴ全都采用这种控制方式。这类卫星寿命长,可靠性高,但提供的电力有限,姿态控制精度也受到限制。
到了七十年代中期,卫星的姿态控制的方向逐渐转向三轴稳定,典型卫星有交响乐(Symphonie)、通信卫星(Sateom)、Intelsat一Ⅴ、印度卫星(Insat)等。面对着这种竞争,从事自旋稳定卫星研制的厂商锲而不舍,不断对方案加以改进,并充分利用新一代运载工具—航天飞机给自旋稳定卫星结构上带来的方便(可使卫星直径的限制放宽),使自旋稳定卫星目前达到了足以与三轴稳定卫星分庭抗礼的地步。
如最近确认的大型实用静止通信卫星—兄弟卫星(Aink—C)、出租卫星(Leasat)、Intelsat—Ⅵ就是这种新发展的体现。2
自旋稳定的特点 自旋稳定涉及章动和进动。如图所示,自旋轴x与要求的自旋轴方向x0的夹角α即为自旋轴指向误差,可以通过进动偏角δ(角动量L与要求的自旋轴x0方向之间的夹角)和章动角η(角动量L与自旋轴x方向之间的夹角),对姿态偏差进行控制。
自旋稳定涉及章动和进动。如图所示,自旋轴x与要求的自旋轴方向x0的夹角α即为自旋轴指向误差,可以通过进动偏角δ(角动量L与要求的自旋轴x0方向之间的夹角)和章动角η(角动量L与自旋轴x方向之间的夹角),对姿态偏差进行控制。
奔月变轨过程包括如图所示的5个阶段,其中,Ⅰ为起旋阶段;Ⅱ为起旋结束到发动机点火阶段;Ⅲ为发动机点火阶段;Ⅳ为发动机熄火至消旋开始阶段;Ⅴ为消旋阶段。
起旋和消旋2个阶段消耗的燃料较少,月球探测器的质量特性近似不变,可以认为在这2个阶段中探测器的模型属常参数模型。其间,由于起(消)旋推力器推力和时延偏差等因素,卫星会产生章动;同时,因不可避免地存在气动和太阳光压等外力矩,卫星在章动的同时还伴随有进动。如在起旋过程中,月球探测器绕自旋轴作加速自旋运动,因其速度不是固定值,故给用于主动消章控制的喷气相位的准确确定造成困难。此外,在卫星具有大角动量情况下,纠偏所消耗的燃料多。基于这些因素,起旋应分段进行,即先将卫星起旋至一定转速,随后进行主动章动和进动控制,然后再喷气起旋至额定转速。
在起旋结束至发动机点火和发动机熄火至消旋开始2个阶段中,月球探测器处于常参数模型的自由飞行阶段,探测器绕自旋轴的转速为一常值。在起旋结束到发动机点火阶段中,姿态控制的目的是减小起旋阶段横向干扰造成的自旋轴姿态偏差,确保变轨发动机点火时的变轨姿态满足要求;而在发动机熄火至消旋开始阶段中,姿态控制的目的是为了保证后续消旋的顺利进行。
发动机点火阶段燃料的消耗率高,其质量特性有一定的变化,由发动机推力偏斜和偏心引起的横向干扰较大。因此,该阶段的特点是有大干扰和模型参数变化,应进行主动章动和进动控制,以保证变轨姿态在要求的精度范围内。
由此可知,奔月变轨过程需分阶段多次实施主动章动和进动控制。为便于确定喷气相位,应在转速恒定阶段进行控制操作。3
主动式自旋稳定姿态控制方法定义及原理由动量矩定理dL/dt=M可知,作用于航天器的外力矩M直接改变的是动量矩L的大小与方向。航天器自旋后,因不可避免地存在横向角速度,故L的方向与自旋轴x轴不重合,即存在章动,致使L不能直接反映x的方向变化,因此无法直接控制自旋轴姿态。
空间角α,β,θ的定义如图所示。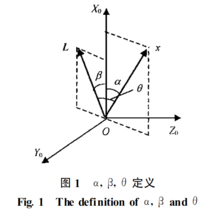 图中,X0为所要求的自旋轴方向;Y0,Z0与X0构成右手惯性坐标系;α为x与X0的姿态偏角,即姿态控制的被控量;β为L与X0的偏角(简称偏角);θ为L与x的夹角,即章动角。由分析可知,α可由β,θ共同描述,其中αmax=β+θ,αmin=β-θ,在一般情况下α≠β+θ。
图中,X0为所要求的自旋轴方向;Y0,Z0与X0构成右手惯性坐标系;α为x与X0的姿态偏角,即姿态控制的被控量;β为L与X0的偏角(简称偏角);θ为L与x的夹角,即章动角。由分析可知,α可由β,θ共同描述,其中αmax=β+θ,αmin=β-θ,在一般情况下α≠β+θ。
因为tanθ=LT/LX(此处,LT为L在自旋轴x与机体轴y,z构成的机体坐标系中oyz平面上的分量),而自旋航天器的LX较大且变化较小,在适当方向上施加控制力矩,可通过减小LT来减小章动角θ。将减小章动角θ的控制称为消章控制。
由动量矩定理和自旋体进动特性可知,自旋体在外力矩M的作用下,L沿M指向改变其方向。因此,在适当方向上施加控制力矩,可通过改变L的方向来减小偏角β。将减小偏角β的控制称为消偏控制。
由图可知,当消章和消偏控制分别将θ,β控制在很小时,α必为很小。因此,通过消章消偏综合控制即可实现自旋稳定姿态控制。但是,消章和消偏控制均是使L接近x,X0,两者的控制作用可能相互抵消。为此,需对两类控制进行合理约束,以确保两者不矛盾。
美国ATS-D,ATS-E卫星忽略偏角β的影响,通过章动控制器实现自旋轴姿态控制,其实质即为本文的消章控制。我国STW-1卫星忽略章动角θ的影响,进行自旋轴姿态控制,其实质即为消偏控制。而当β,θ都很大,不能忽略时,只有同时考虑消章和消偏控制,才获得较好的控制效果。1
消章控制采用喷管作为控制系统执行机构。除具有死区、磁滞和继电等非线性特性外,喷管一般还具有延迟时间、最短工作时间、最短间歇时间等特性。这些特性对控制效果均有影响,设计控制算法时必须予以考虑。
若自旋航天器为对称刚体,则 (此处,J=Jy=Jz),且自旋航天器ωx较大并基本不变,因此可通过减小横向角速度矢量ωT的模,减小章动角θ。自由飞行态下无外力矩,多数控制方法最终都可以将章动角θ控制在要求的精度内。但如果不经精心设计,往往会造成控制时间长、脉冲多、燃料消耗大,并引起章动角的振荡。采用间歇较大、作用时间较短、力矩较小的弱控制方式进行消章控制,并对控制力矩的施加方位进行分析,设计了最优消章相位的角速度消章控制法。该法可在满足精度要求的同时,尽可能提高喷管燃料的利用率。1
(此处,J=Jy=Jz),且自旋航天器ωx较大并基本不变,因此可通过减小横向角速度矢量ωT的模,减小章动角θ。自由飞行态下无外力矩,多数控制方法最终都可以将章动角θ控制在要求的精度内。但如果不经精心设计,往往会造成控制时间长、脉冲多、燃料消耗大,并引起章动角的振荡。采用间歇较大、作用时间较短、力矩较小的弱控制方式进行消章控制,并对控制力矩的施加方位进行分析,设计了最优消章相位的角速度消章控制法。该法可在满足精度要求的同时,尽可能提高喷管燃料的利用率。1
消偏控制自由飞行态时,自旋航天器也可以采用弱控制方式进行消偏控制。在外力矩M的作用下,L沿M指向改变其方向,其中垂直于L的力矩可最有效地改变L的方向。与L,X0轴共面且垂直于L并指向X0轴的力矩,将使L沿最有效减小偏角β的方向运动,该力矩方向即为最优消偏相位。1
自旋稳定卫星自旋稳定卫星的姿态稳定性好,控制技术比较简单,卫星上有些需要扫描的探测设备也可以借助卫星自旋实现一个方向的扫描,因此,有些静止卫星采用自旋稳定的方案。在自旋卫星上,有很多控制以及某些设备的工作是和卫星的自旋相位有关的。例如,自旋卫星上定向天线波束应当不随卫星旋转,而始终保持对准地球,这就需要对自旋卫星的天线进行消旋。不管是机械消旋还是电消旋,都需要与卫星的自旋相位同步,一般要求同步的精度在。05°左右。
在自旋卫星的姿态控制中,肼喷气系统是脉冲式工作的,控制脉冲相对姿态基准的相位角有一定的要求,这就是说产生控制脉冲时需要知道卫星自旋相位,姿态控制对同步精度的要求差不多为0。1°左右。卫星有些遥感探测设备采用瞬时视场扫描方式进行摄像或摄取数据,探测器就装在星体上随卫星自旋,从而实现瞬时视场对探测目标的扫描。这样卫星自旋探测器视场扫到目标时应该摄取目标的信息,因此,对信息源数据采集也要和卫星自旋同步。如果自旋一周,得到目标的一条扫描线数据,接着探测器再步进一步,自旋第二周,又得到目标的不相重合的第二条扫描线数据,从而实现对目标的二维扫描。扫描线与扫描线的配准也是靠与卫星自旋同步来实现,一般探测设备对同步精度要求要比它的瞬时视场高一个数量级。如此等等。
因此在自旋稳定静止卫星中,卫星自旋同步技术是不可缺少的。卫星的自旋转速是根据卫星总体设计确定的,一般选择在50一100r/min的范围。卫星在运行中,其转速也是变化的,如星体上某些部件机械运动,卫星结构的温度效应,太阳的光压影响,卫星章动的阻尼和控制,姿态控制等因素,都会引起卫星转速的变化。卫星控制系统一般要把转速控制在变化不超过±1%的范围。卫星自旋同步技术就是要建立一个跟踪卫星转速变化和卫星自旋相位同步的角度钟,这样能在不同的自旋相位上产生各种同步控制信号。4

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国