

背景
在高压开关设备中,隔离开关(DS)的使用量是最大的,在高压电网中起到隔离线路,建立可靠绝缘间隙的作用,DS还用于换接线路以及变换母线接线方式。DS性能的好坏直接影响电网的安全运行,是高压电网中最重要的设备之一。
高压隔离开关在分合闸过程中常由于操动机构速度的快或慢而引起拒分、拒合、分合闸不到位以及传动部件损坏变形等故障,因此,有必要对开关触头的运动过程进行控制。以往的高压隔离开关操动机构采用弹簧、液压或气动技术,具有连杆多、结构复杂的缺点,因此,其累计运动公差大、响应缓慢、可控性差,难以实现触头的运动控制。
为了能让开关触头在运动过程中具有良好的可控性,提高其分合闸可靠性,减少操作故障,在高压断路器电机操动机构的研究基础上,提出了高压隔离开关无刷直流电机(BLDCM)操动机构,设计了其调速控制系统。以550kV高压隔离开触头运动过程为研究对象,搭建了以DSP为核心的控制系统,采用电流和速度双闭环控制策略对触头的运动过程进行控制。通过基于DSP的电机操动机构控制系统可实现DS分合闸过程中触头运动的调速控制。1
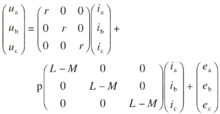
BLDCM操动机构可控性BLDCM三相绕组的电压平衡方程可表示为
定子绕组产生的电磁转矩方程与运动方程分别为:
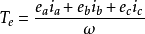
式中:
ua、ub、uc——为定子相绕组电压;
r——为定子每相电阻;
ia、ib、ic——为定子相绕组电流;
ea、eb、ec——为定子相绕组电动势;
 L——为每相绕组的电感;
L——为每相绕组的电感;
M——为每相绕组间的互感;
p——为微分算子;
Te——为电磁转矩;
TL——为负载转矩;
B——为阻尼系数;
J——为转动惯量;
ω——为电机机械角速度。
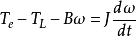
根据其数学模型分析可知,为了能够对电机运动速度进行控制,进而控制开关触头的运动过程,须在两相绕组的两端加上可变电压,采用脉宽调制(PWM)技术来获得可变电压。DS触头运动的驱动力由BLDCM提供,触头运动速度的调整是通过改变PWM 的占空比来实现的。不同的占空比下电机带动触头运动的行程是不同的,如上图所示,从左至右依次为占空比是90%、75%、65%、60%电机运动的行程曲线。从图中可以得出,占空比越大,行程曲线的上升斜率越大,即电机转速越大;随着占空比的减小,行程曲线斜率变小,即电机转速变小。
通过实时改变PWM 的占空比可以实现对电机转速的控制,进而实现对开关触头运动过程的控制,使触头运动能够在特定的行程点达到特定的速度要求。1
DS电机操动机构及调速控制系统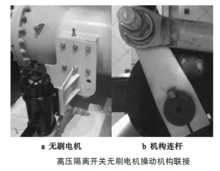 1、BLDCM 操动机构
1、BLDCM 操动机构
右图为550kV配电机操动机构的隔离开关实物图。DS电机操动机构是一台配有限位器的BLDCM,它通过拐臂直接驱动DS传动主轴,带动开关触头实现分合操作,克服了以往的高压隔离开关操动机构采用弹簧、液压或气动技术,具有的连杆多、结构复杂等缺点.
2、DS电机机构控制系统
控制系统选用DSP作为控制模块核心来完成整个系统的功能。该系统还包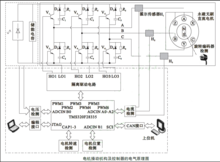 括分合闸隔离驱动控制电路、电机位置检测电路、速度检测电路、绕组线圈电流检测电路以及电容充放电控制电路等。电动机操动机构及控制器的电气原理图如图所示。
括分合闸隔离驱动控制电路、电机位置检测电路、速度检测电路、绕组线圈电流检测电路以及电容充放电控制电路等。电动机操动机构及控制器的电气原理图如图所示。
1)分合闸隔离驱动控制电路设计。采用功率开关器件IGBT来控制三相绕组电流的通断,并设置RCD缓冲电路改变器件的开关轨迹控制各种瞬态过压,降低器件开关损耗,保护器件安全运行。如图3所示,在IGBT关断过程中,电容C通过二极管充电,吸收关断过程产生的du/dt,在IGBT开通后,通过电阻R放电。吸收二极管必须选用快速恢复二极管,其额定电流应不小于主电路器件额定电流的1/10。此外,应尽量减小线路电感,应选用内部电感尽量小且高频特性好的吸收电容。
2)电机位置检测电路设计。位置检测电路起着测量转子磁极相对位置的作用,为逻辑开关电路提供正确的换相信息,然后控制定子绕组换相。本控制系统采用三个锁存型霍尔元件按一定角度固定在霍尔盘上作为电机位置检测传感器。霍尔盘固定在电机外壳上,制作一个圆形磁钢模拟电机内部磁场分布,磁钢固定在电机主轴上。当电机运动时带动磁钢旋转,霍尔元件输出电平发生变化,DSP通过捕获霍尔元件输出信号获取电机转子所处位置。
3)速度检测电路设计。采用光电旋转编码器去检测转子的速度,光电旋转编码器由固定在定子上的光电耦合开关和固定在转子轴上的遮光盘所组成。光电耦合开关沿圆周均匀分布,每只光耦合开关由相互对着的红外发光二极管和光敏三极管组成。遮光盘位于发光二极管和光敏三极管中间,盘上开有一定角度的窗口。红外发光二极管通电后发出红外光,当遮光盘随电机转子一同旋转时,红外光间断地照在光敏三极管上,使其不断导通和截止,其输出信号反映了转子的速度。
4)绕组线圈电流检测电路设计。传统的电流检测电路多利用分压电阻的方式,此种方法简单,但电阻会因为温漂而发生变化,无法保证测量的精度。同时外部电路与控制电路之间没有电气隔离,极易造成主回路中的较高电压对控制回路的冲击,对控制系统的安全构成威胁。因此在电流测量电路中,采用可实现电气隔离的霍尔型电流传感器CHF-400B,传感器输出电压与输入电流成比例,比值为1/100。电机在正常运行过程中每相绕组中的电流是交变的,但是A/D模块的输入电压范围是0~3.3V,所以在传感器输出信号前应先通过加法器,再经过比例运算电路以保证线圈电流信号的安全性。
5)电容充放电控制电路设计。BLDCM 采用储能电容代替传统的弹簧等储能方式。在控制系统中设计了电容的充放电控制回路,当控制器上电后,首先对电容器组进行充电,由DSP采集电容电压的信号并进行处理,当电压值达到系统操作要求时,DSP发出停止充电指令,切断外界电源。1
控制策略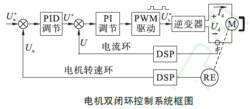 设计的控制系统采用双闭环控制,内环为电流环,外环为速度环,内外环均采用PID控制算法,系统控制框图如图所示。
设计的控制系统采用双闭环控制,内环为电流环,外环为速度环,内外环均采用PID控制算法,系统控制框图如图所示。
在DS触头运动过程中,电机侧参考速度值与电机实际测量到的信号比较得到误差信号。误差信号经过PID控制器,进行外环的速度调节,速度环的输出信号作为电流PID控制器输入信号,电流环的输出信号给IGBT模块提供脉冲触发信号,通过调整PWM 的占空比来实现对电机速度的控制。
结论对DS操动机构电机控制系统进行搭建并做了大量的试验,可以得到以下结论:
1)结合对BLDCM数学模型分析,提出并研究了DS电机操动机构控制技术。该操动系统将高压电器技术和电机控制系统相关理论及应用技术结合,克服了传统DS机构操动过程的不可控.经过运行、调试,结果证明了该方案的可行性。
2)通过调速控制系统,能够使DS触头在特定行程段达到特定的速度以满足550kVDS技术指标要求。
3)BLDCM操动机构不仅能提供基本的DS驱动功能,更能够实现DS操动过程的智能化操作,为高压隔离开关操动机构提供了更先进的应用平台新技术。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国