

简介
振动控制早在20世纪初就已应用于机械行业,而后又广泛应用于航天和遗输工程中,在土木工程中的应用却相对较晚,至今只有二十多年的历史,但自美国学者LT_P.Yao1972年首次提出结构控制的概念以来,结构振动控制的研究和应用越来越得到人们的广泛关注和重视,目前已成为结构工程和结构力学领域最具前沿性的发展方向之一,并已在世界各国的实际工程中得到应用。
结构振动控制可分为被动控制、主动控制和半主动控制三种。被动控制是无外加能源的控制,其控制力是控制装置随结构一起振动变形,因装置自身的运动而被动产生的。主动控制是有外加能源的择制,其控制力是控制装置按某种控制规律,利用外加能源主动施加的。半主动控制一般为有少量外加能源的控制,其控制力虽也由控制装置自身的运动而被动地产生,但在控制过程中控制装置可以利用外加能源主动调整自身的参数,从而起到调节控制力的作用。这三种控制中,主动控制的效果最好,但由于建筑结构体型巨大,导致所需外加能源较大,加之控置装置比较复杂,因此其应用程度目前还逊色于被动控制和半主动控制。
除上述三种控制形式外,近年来混合控制也日渐成为结构振动控制领域新的发展趋势。所谓混合控制就是在结构上同时应用被动控制和主动控制,或者是同时应用不只一种的被动控制装置,从而充分发挥每一种控制形式和每一种控制装置的长处,克服它们的弱点,以获得更好的控制效果。
被动控制从广义上讲可分为基础隔震和耗能吸能减振两大类,其中基础隔震经过国内外学者多年的研究和大量工程应用,目前已形成一个比较完整的体系。近年来,人们在提到基础隔震时常常将其视为一种独特的控制形式,而与主动控制等相提并。这样,被动控制从狭义上讲,就只包含耗能吸能减振了。1
被动控制理论被动控制是指在结构的适当部位附加耗能装置或子结构系统,或对结构自身的某些构件作构造上的处理已改变结构体系的动力特性。被动控制是无外加能源的控制,其控制力是由控制装置随着结构一起振动变形而被动产生的,因此,控制过程不依赖于结构反应和外界干扰信息。被动控制可分为基础隔震技术、消能减震技术和吸振减震技术。被动控制由于具有构造简单、造价低、易于维护和不需外部能源等优点,故引起工程界的广泛关注,成为应用研发的热点。其中研究和应用最多、最成熟的技术是隔震技术,国内外己建隔震建筑数百栋,其中一些隔震建筑己在几次大震中成功经受考验。
被动控制中常用的阻尼器包括粘弹性阻尼器、粘滞阻尼器、摩擦阻尼器、屈服装置、调谐质量阻尼器和调谐液体阻尼器六大类。2
粘弹性阻尼器粘弹性阻尼器是由粘弹性材料和约束钢板组成,粘弹性材料是一种高分子聚合物,由于聚合物材料分子链组成网络的压缩、错动和松弛会耗散能量,产生阻尼,粘弹性材料大部分采用丙烯酸聚合物。根据粘弹性层的变形方式,粘弹性阻尼器可分为拉压型和剪切型。目前常用的为剪切型阻尼器,如图所示。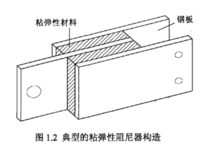
一般设在结构层间能产生相对变形处,当结构层间发生位移时,粘弹性材料产生剪切滞回变形,耗散振动能量,减小结构的动力反应。
由于粘弹性阻尼器的耗能性能受到温度、频率应变幅值的影响,目前对其耗能性能的描述均不能很好的反映温度及频率的影响,因此,有许多有关其力学性能及计算模型方面的研究。刘棣华认为粘弹性材料的储存模最和损耗因子受环境温度和频率的影响尤为显著,其影响规律为:损耗模重随温度的升高而降低,随频率的升高而升高;损耗因子随温度的变化有一最大值,随频率的变化也有一最大值;关于粘弹性阻尼器的计算模型有Maxwell模型、Kelvin模型、等效标准固体模型和等效线性固体模型。此外,还有复刚度模型、微段模型、四参数模型和有限元模型等等。
粘滞阻尼器粘滞阻尼器是根据流体运动,特别是当流体通过节流孔时会产生粘滞阻力的原理而制成的,是一种无刚度、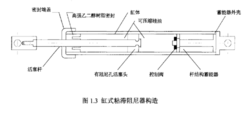 速度相关型阻尼器。缸式粘滞阻尼器通常由缸筒、活塞、粘滞流体和导杆等组成,基本构造见图。缸筒内充满粘滞流体,活塞可在缸简内作往复运动,活塞上开有适量小孔或活塞与缸筒留有间隙。当结构因变形使缸筒和活塞产生相对运动时,迫使粘滞流体从小孔或间隙流过产生阻尼力,从而将结构振动的能呆通过粘滞耗能消散掉,达到减震的目的。
速度相关型阻尼器。缸式粘滞阻尼器通常由缸筒、活塞、粘滞流体和导杆等组成,基本构造见图。缸筒内充满粘滞流体,活塞可在缸简内作往复运动,活塞上开有适量小孔或活塞与缸筒留有间隙。当结构因变形使缸筒和活塞产生相对运动时,迫使粘滞流体从小孔或间隙流过产生阻尼力,从而将结构振动的能呆通过粘滞耗能消散掉,达到减震的目的。
粘滞阻尼器是20世纪80年代由曰本学者Mitsuo Miyazaki发明, 由Sumitomo建筑公司研制成功的可作为墙体安装在结构层间的阻尼系统。它由内部钢板、外部钢板以及内外钢板之间的粘滞液体组成,内部钢板固定于上层楼面,外部钢板固定于下层楼面,当结构受到风或地震作用时,下楼面的运动速度不同,导致内部钢板和外部钢板产生相对速度,使高浓度阻尼材料发生剪切变形,产生阻尼力,从而使结构的阻尼增大,降低结构的动力反应,其构造和减震原理如图。
由Sumitomo建筑公司研制成功的可作为墙体安装在结构层间的阻尼系统。它由内部钢板、外部钢板以及内外钢板之间的粘滞液体组成,内部钢板固定于上层楼面,外部钢板固定于下层楼面,当结构受到风或地震作用时,下楼面的运动速度不同,导致内部钢板和外部钢板产生相对速度,使高浓度阻尼材料发生剪切变形,产生阻尼力,从而使结构的阻尼增大,降低结构的动力反应,其构造和减震原理如图。
粘滞阻尼器可产生较大阻尼力,有效减小结构的振动,同时阻尼器产生的阻尼力与结构的位移反应和柱中弯矩异向,因此该阻尼器在减小结构层间位移和剪力的同时,不会在柱中产生与柱弯矩同向的轴力,此外,沾滞阻尼器对激励频率的变化不敏感。
调谐质量阻尼器调谐质量阻尼器(Tuned Mass Damper,简称TMD)结构应用的思想,最早来源是1909年Frahin研究的动力吸振器。
调谐质量减震体系由主结构和附加的子结构组成,附加子结构具有质量、刚度和阻尼,可以调整子结构的自振频率,使其尽量接近主结构的基本频率或激励频率。这样当主结构受激励而振动时,子结构就会产生一个与主结构振动方向相反的惯性力作用在主结构上,使主结构的振动反应衰减。子结构是固体质量块,称为“调谐质量阻尼器”(TMD)。TMD在结构中的设置方式分为支承式和悬吊式。如图所示。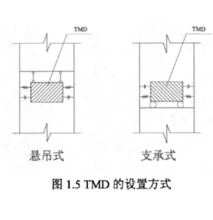
从20世纪70年代以来,TMD己经广泛应用在建筑结构的减振控制中。所作的工作基本上都是致力于发展TMD的设计方法和为改善性能对TMD的参数进行优化方面。在大部分应用中,只在结构的顶层安装单个的TMD,并且调谐到结构的基本振型。2
调谐液体阻尼器调谐液体阻尼器**(**Tuned Liquid Damper,简称TLD)结构应用的思想来源是1909年Frahm研究的动力吸振器。它与TMD不同之处只是将子结构放置于液体容器中。
国内外应用实例有口本的新横滨王子饭店、长崎机场塔、横滨港导航塔,Nagasaki机场指挥塔;南京电视塔、珠海金山大厦等。
摩擦阻尼器摩擦阻尼器是根据摩擦做功耗散能量的原理设计的。目前已有多种不同构造的摩擦耗器,如pall摩擦阻尼器、限位摩擦耗能器、摩擦剪切铰阻尼,滑移型长孔螺栓节点阻尼器,这些摩擦阻尼器都具有较好的库仑特性,摩擦耗能明显,可以提供较人的附加阻尼,荷载大小和频率对其性能的影响不大,且构造简单、取材容易,造价低廉,因而具有很好的应用前景。它的缺点是两种材料在恒定的正压力作用下,保持长期的静接触,会产生冷粘结或冷凝固,使所期望的摩擦系数发生改变。另外,在地震作用时,滑动面产生滑动而使摩擦装置产生退化,地震后会产生永久性偏位,需要进行维修和保护。
智能材料阻尼器智能材料是一种同时具有感知和驱动功能的新型材料,如电流变流体(ER)、磁流变流体(MR)、光纤材料、压电材料、电致伸缩材料、磁致伸缩材料、形状记忆合金等。利用智能材料的特殊性能研制的阻尼器有:电流变液阻尼器、磁流变阻尼器、压电摩擦型阻尼器、形状记忆合金阻尼器。
目前,开发具有优良性能的被动耗能减震装贾仍然是结构控制领域研究的热点问题之一。
被动控制系统参数优化设置被动控制系统的结构减震设计关键,在于合理地确定阻尼器的位置与参数。较早的结构减震研究主要关注减震装置在结构中的可行性,并通过大量算例来对比不同参数或布置下减震效果的差异,直接将优化方法应用于减震控制的研究还较少,并且在进行减震结构优化分析时均要对结构进行简化,影响了优化方法在复杂工程中的应用。
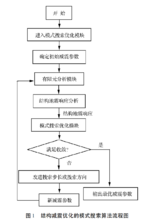
参数优化分析减震参数优化分析包含两个部分的内容:结构地震响应分析与模式搜索算法寻优。这里通过Matlab编制目标函数程序,实现模式搜索优化程序对减震结构有限元分析结果的调用,从而实现优化程序与有限元程序的互动,流程图所示。3
数学模型结构减震系统的优化需要确定设计变量、目标函数与约束条件来建立数学模型。减震结构优化是期望在合理的减震成本基础上将地震作用下的结构响应降低到某一限值以下,其数学模型可以通过下式来表达:

式中:XL为减震装置位置变量,XC为减震装置参数变量,Rs为减震结构地震响应,Sd为减震装置的数量表达式。减震结构被动控制系统参数优化模型的目标函数无法表达为设计变量的具体函数形式,更无法求得其关于设计变量的导数或梯度函数。这就要求优化算法在搜索过程中不依靠目标函数的梯度、能在搜索过程中自动获取和积累有关搜索空间的知识,并能自适应地控制搜索过程。
减震参数优化问题中设计变量取值空间往往是连续的,寻优的过程为沿着可行解的取值范围进行搜索。仅仅利用目标函数值的信息直接建立搜索求解的方法称为直接搜索法(direct search method)。以往研究结果表明,结构减震效果与减震装置主要参数的关系曲线往往为一单峰凹凸曲线,不依赖求导的搜索方法将在结构减震参数优化分析中具有较好的适用性。3
火箭发射被动控制系统传统的观念认为,火箭自身的缺陷(推力偏心、质量分布不均衡等)总是不利因素。因为它们是形成射弹散布的根源。这些随机因素对每枚火箭都是不相同的。在发射过程中,每发弹给发射装置作用一个能反映其自身缺陷特性的激励。人们设想,若能设计这样一种发射装置,使它由上述激励所产生的响应恰能补偿或部分补偿由于火箭的缺陷而造成的弹道偏差,那么就意味着实现了控制,变不利因素为有利因素。人们还将全面地研究各种固有频率发射装置的幅频和相频响应函数,从中选取一种发射装置,由它的振动所导致的火箭起始扰动引起的弹道偏差,能与推力偏心和动、静不平衡性所引起的弹道偏差相互补偿。
被动控制与主动控制不同,它不依赖任何外加能源,而是利用火箭发射系统的自反馈来实现控制。反馈是通过相互干扰来传递的。
对实际的柔性发射架,它必须对火箭缺陷的激励十分敏感,且有足够高的自振频率。况且,发射架既受支撑,还能提供有限的转动。被动控制的目的,在于减小散布;主要是减小主动段末速度的偏角散布。
由此,与被动控制有关参数的确定,就必须遵循这一原则。对被动控制影响较大的火箭参量除了推力偏心和动不平衡等缺陷参数之外,还有弹质量、转动惯量、重心位置、前后定心部距离、滑轨段内的滚转角等;对发射装置则是定向器长度、支撑点位置、振动频率、横向转动惯量等。对这些参量都有一个合理值的确定问题,从这个意义上说,被动控制是重要的弹道优化设计的关键一环。4

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国