

简介定义
姿态轨道控制系统主要完成变轨和入轨任务,其中也包括爬升以及改变轨道倾角,以消除姿态静态误差,使卫星按预定姿态和轨道飞行,保证卫星性能,并完成飞行任务。
系统要求姿态控制的任务是保证卫星在从星箭分离到在轨控制过程中保持正确的姿态,提供三轴稳定的对地指向,并保证获得太阳能源。具体要求如下:
1)星箭分离后,进行速率阻尼,建立正确的对地指向;
2)伸杆后的天平动阻尼;
3)伸展太阳帆板,消除太阳帆板展开所引起的姿态扰动,建立卫星的正常姿态;
4)进行正常的姿态控制;
5)安全模式运行。
卫星的轨道控制任务如下:
1)在星箭分离后进行变轨使星座中各颗卫星到达预定的位置;
2)卫星星座在运行过程中通常都要求星座中的各卫星保持一定的相位,由于入轨及运行过程中各种摄动因素的影响,卫星的实际相位与标称相位之间会存在一定的误差。
3)星座运行过程中,为了防止由于摄动引起的卫星轨道漂移(卫星轨道高度发生变化)以及轨道倾角产生的变化,要求控制系统对星座能进行轨道保持。
4)需要合理安排备份星的位置,当星座中的卫星发生故障时将其推离原来的位置以便补充备份星。
姿态敏感器姿态确定是姿态控制的前提,它的任务是利用星上的姿态敏感器测量所得的卫星姿态信息,经过处理求得固连于卫星本体坐标系相对于空间参考坐标系的姿态角信息。姿态确定系统主要由姿态敏感器和相应的信息处理算法即姿态确定算法组成,而姿态确定的精度则取决于姿态敏感器的精度和姿态确定算法的精度。姿态确定是否正确、精度的高低,直接关系到卫星的姿态控制与卫星的功能实现与卫星使用寿命。
目前,工程上应用的姿态敏感器主要包括以下几类:
(1)利用地球物理特性的敏感器。如红外地平仪、磁强计、地球敏感器、陆标跟踪器等;
(2)利用天体位置的敏感器。如太阳敏感器、星敏感器;
(3)利用惯性信标的敏感器。如各种陀螺仪(有光纤陀螺、液浮陀螺、半球谐振陀螺等)、角加速度计;
(4)利用无线电信标的射频敏感器1
姿态轨道控制技术卫星总体包括:结构分系统、姿态控制分系统、电源分系统、热控分系统、星务管理分系统、测控通信分系统以及推进分系统等基本组成部分。姿态控制系统的作用是使卫星按预定姿态和轨道飞行,保证卫星性能,并完成飞行任务。国外小卫星的姿控技术已从早期的无控制(如美国oscAR.1系列卫星)不断发展到自旋稳定;自旋稳定加无源磁阻尼器;自旋稳定加主动阻尼;重力梯度稳定;重力梯度加无源阻尼器;重力梯度加有源阻尼器;双自旋稳定;偏置动量和零动量三轴稳定等系列。重力梯度稳定由于组成简单,不需或较少需要姿态敏感器,通常只需配置阻尼磁力矩器(磁块)就可在低圆轨道上进行稳定。但其结构复杂,指向精度低,难以适用于应用卫星,多数情况下可应用于科学试验,如科学探测、新产品新器件上天考核、在轨通信方案等。
自旋稳定分全方向不加控制的任意姿态和具有一定指向控制要求两种方式。前者一般用于通信试验;后者为双自旋,卫星结构复杂,多数用于通信试验等。偏置动量控制作为主动控制是小卫星姿态控制方案中比较常用的;零动量控制一般应用于有姿态机动要求的高精度指向的小卫星。2
如图为几种不同小卫星姿态控制的技术方案。
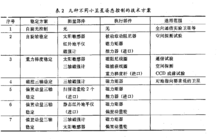
目前国外通信和遥感等应用小卫星的姿态控制大多采用偏置动量三轴稳定方案。姿态测量部件主要有:三轴磁强计、红外地平仪、太阳敏感器、星敏感器、扫描动量轮、陀螺、GPS定位等。执行部件主要有偏置动量轮、磁力矩器和推力器等。控制器主要采用卫星数字计算机。
国内提出了多种小卫星的技术方案,姿态控制的方案有重力梯度、自旋和偏置动量三轴稳定方案。由于空间科学试验、通信科学试验和新型有效载荷的科学试验卫星等对指向精度要求不高,允许卫星姿态有较大的偏差,有些甚至可以不控制,姿态控制可采用重力梯度、自旋稳定等方案。但大多数应用型小卫星(如通信小卫星、遥感应用等小卫星)对姿态有一定的要求,因此它们大多选择偏置动量稳定方案,以保证较高的适用性和通用性。2
典型控制系统“铱星”星座铱系统是由66颗卫星联网形成的可交换数字通信系统。“铱星”星座运行在6个极地轨道共同旋转平面,分别相隔31.5度,倾角86度,每个极地轨道平面有11个卫星相等间距分布,卫星的高度为780km。在地面最小仰角为8.2°的条件下完成全球连续覆盖。“铱星”采用三轴稳定,姿态精度±0.5°,位置保持的精度为±20km,卫星的寿命为5年。姿态控制分系统由敏感器、控制执行部件和电子处理设备组成。
“铱星”采用星敏感器、太阳敏感器作为姿态测量部件,星敏感器由两个星跟踪器组成。星跟踪器是以恒星为参照物的。星跟踪器在航天器上实拍到星图后,通过一系列计算,可确定星跟踪器光轴在惯性空间的瞬时指向。因此,一般在飞行器上安装两个星跟踪器,就可以自主地确定飞行器的姿态。动量轮、陀螺作为执行部件,用磁力矩棒给飞轮卸载,用磁强计确定磁力矩的极性。“铱星”系统的多种在轨功能,包括变轨机动、轨道捕获、轨道调整、阻力补偿和位置保持以及卫星指向控制和退出轨道都能由推进分系统完成。“铱星”采用先进的化学推进系统,采用单元肼燃料作为推进剂。
“全球星”星座“全球星’’系统由48颗工作卫星和8颗轨道备份卫星组成。工作星位于8个轨道平面,每个轨道平面6颗卫星,卫星轨道高度1414km,倾角52°,相同轨道面内卫星间隔60°。“全球星”系统的卫星姿态和轨道控制系统的敏感器部件由下列部分组成:三轴模拟式太阳敏感器、一套红外地球敏感器、一个三轴磁通门磁强计、一台双GPS张量接受机。卫星姿态与轨道控制系统的执行机构由下列部分组成:5个单组元肼推力器,推力均为1N;4个动量飞轮,每个飞轮角动量为6N.m.s;2个磁力棒,每根磁力棒的磁矩为80Am2。
“全球星”系统的姿态控制共有三种控制模式:1)故障安全模式,在发生姿态控制故障时,使太阳电池帆板指向太阳,确保电源供应;2)姿态捕获模式,首先捕获太阳,然后捕获地球;3)正常模式。
在正常模式下,由4个动量轮以四面体斜装方式实现零动量偏置或动量偏置(当没有偏航姿态信息时)三轴姿态稳定,同时也可以实现偏航姿态偏置的三轴稳定,后者是为了保证单轴太阳电池帆板定向控制,能满足为非太阳同步轨道卫星长期提供满功耗电源的需要。飞轮饱和由两根磁力矩棒提供卸载力矩。星座轨道校正全部由单组元肼推力器承担。
Orbcomm小卫星星座Orbcomm是美国轨道科学公司研制并即将
建成的一个低轨道卫星数据通信系统。它由36颗小卫星组成,每颗卫星重大约42kg,其中28颗为工作星,另外8颗为备份。0rbcomm小卫星姿态控制系统的执行机构和敏感器包括两个5Am2磁力矩器磁棒;一个5Am2磁线圈;两个凝视式地球敏感器;三轴磁强计;六个粗太阳敏感器;天线与太阳帆板一体化装置。姿控系统采用重力梯度稳定与磁控相结合。天线兼作重力杆,长度为3.2m,重1.5kg,伸杆方向为偏航轴。两台红外地平仪分别测量俯仰和滚动姿态角。太阳能帆板上装有用于控制帆板指向的粗太阳敏感器。星上安装两根棒式5Am2磁力矩器和一个5Am2磁线圈,作为姿态磁控和重力梯度天平动阻尼。在偏航轴安装一个反作用飞轮,用于控制偏航姿态。当轨道进动时,它可以满足使太阳帆板指向太阳的要求。为了维持星座各星之间轨道相互位置,在星上安装了用于确定每颗卫星的动态位置的GPS接收机。此外,还安装了一套简单落压式冷气(氮)推进系统,氮气贮存在轻型复合材料贮箱中,该推进系统有两个推力器,每个推力器的推力为0.4N。推力器沿卫星速度方向产生推力。这是用于捕获卫星初始轨道必需的,也可作为卫星控制系统推力的备份。星座位置保持由姿态控制系统兼管,这主要是通过太阳帆板位置和偏航姿态角适当变化,产生气动阻力差来实现的。
Orbcomm星座由于没有星间通信,不需要轨道保持。对卫星只需作少量入轨机动以确保轨道平面之间的半长轴相同,从而减少轨道面交点线的相对漂移,以维持覆盖均匀分布。在4年卫星寿命期内,漂移很小,因此不需要进一步作轨道修正。2
研究现状当姿态确定系统完成姿态确定后,需要将姿态参数传给姿态控制系统,以实现对卫星姿态的控制。姿态控制系统是保证卫星姿态稳定与卫星功能实现的关键,是卫星姿态控制系统的核心。姿态控制系统相对于姿态确定系统而言,主要包括控制规律设计和执行机构问题。
姿态控制系统的任务可分为姿态稳定和姿态机动两方面。姿态机动是使卫星从一种姿态过渡到另一种姿态的再定向过程;姿态稳定是使卫星姿态保持在给定方向上,如对地定向、对日定向等。为了满足不断发展的空间任务对卫星姿态控制的更高要求,各国都在大力发展先进的控制理论和控制技术以提高姿态控制的精度。1
(1)PID控制律是一种经典的控制方式。实践证明,PID控制率是一种精确和具有先进性的控制律,它多为三轴稳定航天器所采用,例如美国的Landsat-D卫星,Clementine月球探测器等。随着先进理论和技术的发展,出现了自适应PID、自整定PID、自学习PID等改进的PID控制形式,进一步提高了它的性能和精度。目前PID控制已经广泛被应用在航天领域。
(2)变结构控制规律
卫星在空间运行期间会遇到多种复杂情况,当要求卫星作大角度机动时姿态控制系统是一个强耦合非线性系统,而且某些系统参数不确定,例如星体惯量、干扰力矩变化等。变结构控制是解决非线性控制问题的一种综合控制方法,其最大的优点是对系统的干扰与摄动具有完全的鲁棒性。因此变结构控制器在航天器领域的应用研究得以迅速发展。
(3)鲁棒控制方法
自从上世纪80年代以来,鲁棒控制理论引起了人们的高度重视,可以说是鲁棒控制理论的发展阶段。鲁棒控制理论继承了以往的鲁棒性研究方法,以基于状态空间模型的频率设计方法为主,提出了从根本上解决控制对象模型不确定性和外界扰动不确定性问题的有效方法,在一定程度上弥补了现代控制理论对数学模型过度依赖的缺陷。不仅能够用于单输入反馈控制系统的鲁棒性分析和设计,而且可以成功地应用到多输入多输出的场合,能够设计出性能更优越、鲁棒性能更好的反馈控制系统。并且随着线性矩阵不等式方法的提出,线性系统的H∞控制理论体系已基本形成,其应用研究也取得了蓬勃发展。
随着航天任务要求的不断提高,对姿态控制的要求也日益提高,因此各国也在不断的研究各种先进控制理论,各种理论也在不断的发展。同时执行机构作为卫星姿态控制系统中的重要部分,它的选择是否合理以及性能是否优越也是能否实现高精度控制的关键。卫星的执行机构主要有推力器、反作用飞轮及磁力矩器。其中以推力器为执行机构的三轴稳定姿态控制是一种主动式零动量姿态控制系统。其优点是响应快、指向精度高、但是由于常受到发动机所带数量的影响,一般只用于姿态稳定和姿态机动所带较小的情况。而一般国内外长寿命、高精度、高稳定度的卫星姿态控制系统,都是采用以飞轮为主要执行机构,当飞轮达到饱和时可以采用推力器或磁力矩器对飞轮进行卸载。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国