

中继卫星系统(TDRSS)
中继卫星系统(TDRSS)是利用地球同步轨道卫星对在轨航天器或非航天器类目标进行跟踪、测控和数据中继的系统,为中、低轨道的航天器与航天器之间、航天器与地面站之间提供数据中继、连续跟踪与轨道精确测控服务的系统,可实现高测控覆盖率、多目标测控和高速数据传输。中继卫星系统作为增强空间信息传输能力、提高获取信息的时效性、快速反应能力的重要手段,在世界各航天大国都得到了大力发展,是航天测控领域的一次重大变革。
在中继卫星系统中,中继卫星天线对目标的跟踪规律的研究是一个基础的、也是十分重要的方面。另外,为保证中继卫星能够和用户星进行通信,需要中继卫星的单址天线精确地指向用户星,因此,如何设计中继卫星天线指向控制系统,以确保中继卫星单址天线能够精确地指向用户星是中继卫星系统中亟待解决的问题12。
天线指向控制计算模型用户星、中继卫星的位置关系如图1所示,M表 示中继卫星,m表示用户星,△r为中继卫星IOLA(星间链路天线)对用户星的指向矢量。在J2000惯性坐标系,设TDRS位置矢量为
示中继卫星,m表示用户星,△r为中继卫星IOLA(星间链路天线)对用户星的指向矢量。在J2000惯性坐标系,设TDRS位置矢量为 ,用户星位置矢量为
,用户星位置矢量为 ,则
,则 。
。
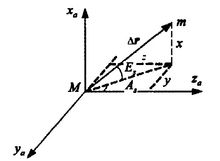
如图2所示,中继卫星IOLA有两个相互垂直的转动轴 和
和 ,天线绕
,天线绕 轴转动的角度为方位角
轴转动的角度为方位角 绕
绕 轴转动的角度为仰角
轴转动的角度为仰角 。△r在天线坐标系中的坐标表示为
。△r在天线坐标系中的坐标表示为 ,则满足:
,则满足:
考虑天线转动限制,需满足 ,
,
 ,则天线指向角为:
,则天线指向角为: ,
, ,如y>0,则
,如y>0,则 。
。
天线指向控制策略中继卫星与用户星(星 -星)之间的天线捕获与跟踪是实现通信的关键。天线指向控制有星 -地大回路指向控制和星上自主控制两种方式。对于中继卫星天线指向控制系统方案,比较普遍的方案是以星上自主控制为主,在紧急情况下辅以星地大回路控制。
星 -地大回路指向控制星 -地大回路指向控制是指地面站根据从中继卫星上跟踪接收及遥测得到的数据等信息,进行有关处理后产生中继卫星单址天线跟踪指向驱动命令;星上自主控制则是由中继卫星处理有关信息,产生单址天线指向驱动命令。
星上自主控制星上自主控制能实现实时控制,控制回路时延相对较小,控制系统稳定性较高,有利于实现高速通信。星载计算机进行星上自主控制可分为捕获和自动跟踪两个模式。
当中继星没有捕获到用户星时,要靠星载计算机(OBC)计算出目标的位置,产生指向角度。为了和星上自主控制的大闭环区别,称这种工作模式为开环模式。开环捕获需要达到足够的精度,才能使系统转入自动跟踪。当由于用户星视线计算误差或者由于用户星的轨道摄动等原因使得开环捕获后用户星并不能进入射频敏感器视场时,需要设计搜索模式,以便用户星能够进入射频敏感器视场。当搜索模式使用户星进入视场,射频敏感器信号出现后,系统从开环控制指向阶段转入捕获模式的锁定阶段,目的是使指向误差进一步减小,天线进入最终的跟踪位置并稳定,以便转入自动跟踪模式。自动跟踪模式的任务是对用户星在其轨道上的某一弧段进行精确的跟踪,对控制精度具有很高的要求1。
天线指向控制模式天线指向控制模式包括回扫、扫描搜索、程序跟踪、自动跟踪和星地控制5种模式,其中前4种为闭环控制模式,而星地控制为开环控制。
(1)回扫模式
该模式是使TDRS天线快速运动到目标位置,指向捕获跟踪起始点的开环控制过程。该模式下,天线按照设计的回扫轨迹运动到指定角度。天线回扫时,由于角速度和角加速度较大,对卫星姿态产生扰动。为减少影响,可通过遥控输入对星体姿态进行补偿。
(2)程序跟踪模式
该模式是利用TDRS天线框架角的测量信号作为反馈量,控制IOLA跟踪用户星运动轨迹的过程,需要事先计算用户目标的拟合轨迹。拟合轨迹由地面根据用户星轨道计算,按照一定的时间间隔分段,每段的控制参数由地面遥控注入。跟踪期间,可根据天线跟踪情况,加入适当的角度偏置量,调整天线跟踪。
(3)扫描搜索模式
该模式用于控制IOLA在一定空间范围搜索用户目标,用旋转变压器测量值作为反馈控制的测量信息,控制天线按螺旋线扫描轨迹运动。由于用户星沿轨道运动,在扫描运动基础上还应叠加对用户星的程序跟踪转动;天线运动将对TDRS姿态有一定的扰动,在运动轨迹中还可视情加入卫星姿态补偿。因此,天线运动轨迹应是螺旋扫描、程序跟踪和姿态补偿3部分之和。
(4)自动跟踪模式
该模式是利用星上射频敏感器输出的指向偏差作为负反馈量的星上闭环控制过程,可实现对用户目标高精度指向控制。该模式中,星上读取敏感器电平信号,当电平信号连续几个采样周期小于失锁阈值,即判断天线自动跟踪已失锁,自动转入程序跟踪模式,控制天线按照用户星轨迹计算结果转动,等待地面干预,或直至跟踪弧段结束。
(5)星地控制模式
星地控制模式作为天线控制器出现故障时的备份手段,增加了地面控制星间天线的灵活性。该模式下,地面将天线控制指令(包含仰角、方位角的步进脉冲数量和脉冲间隔)注入控制器,由OBC开环驱动天线,使天线按指定的步数和间隔运动,完成相应的指向运动2。
天线捕获跟踪控制流程TDRS天线捕获跟踪用户星的控制流程主要有3种控制方式:
(1)回扫控制+程序跟踪
IOLA使用回扫模式快速运动到开始捕获用户星的位置,等待用户星中继天线指向TDRS,待捕跟开始时刻,IOLA使用程序跟踪模式跟踪用户星,直至捕跟弧段结束。
(2)回扫控制+扫描搜索+自动跟踪
IOLA使用回扫模式快速运动到开始捕获用户星的位置,等待用户星中继天线指向TDRS,待到捕跟开始时刻,IOLA使用螺旋扫描模式捕获用户星,当TDRS捕跟接收机检测到用户终端发送的返向信号并锁定时,转为自动跟踪模式跟踪用户星,直至捕跟弧段结束.在自跟踪过程中,不断判断电平信号值,若低于失锁阈值,则转入程序跟踪模式。
(3)回扫控制+程序跟踪+自动跟踪
IOLA使用回扫模式快速运动到开始捕获用户星的位置,等待用户星中继天线指向TDRS,待到捕跟开始时刻,IOLA使用程序跟踪模式跟踪用户星,一旦检测到捕跟接收机锁定用户星时,转为自动跟踪模式。跟踪过程中,若检测到电平信号低于失锁阈值,则转入程序跟踪,直至捕跟弧段结束2。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国