

简介
目标识别是图像处理领域与机器视觉领域的一个基础课题,实际上人们经常在学习、工作生活中利用眼睛与大脑识别一些物体。随着二十世纪40年代电脑的发明和人类对人工智能技术的不断深入研究,人们迫切希望通过图像传感器扮演眼睛的角色,借助于计算机来代替或辅助人类进行脑力劳动。因此,国内外的研究机构或学者在目标识别这个领域做了很多研究,目标识别技术迅猛发展,并有很多研究成果应用于实践当中。近年来,随着国内外学者对图像处理技术和模式识别技术的深入研究,使得利用机器视觉的方法识别地面目标(车辆、行人或人脸识别)成为了可能。而红外成像技术的出现,也使很多学者的研究重心从可见光图像目标物体的识别转移到红外图像目标物体的识别上。
地面目标识别过程主要包括:图像样本采集、样本预处理、训练分类器、目标识别几个步骤。
图像样本采集红外传感器地面目标识别红外成像技术的起源可以追溯至 20 世纪中叶,而它的抗干扰性好、被动工作和目标识别能力强的特点,成功的弥补了可见光传感器在极端恶劣条件下不能很好成像的缺点,使得红外图像处理技术成为当今信息处理中的关键技术,并在行人检测、车辆识别和航空测量等领域得到充分利用。目前,国内外很多高校、研究机构和公司都对基于红外传感器的地面目标识别技术进行了大量研究。1
可见光图像传感器地面目标识别传统的监控设备都是基于可见光传感器的,这些设备在光照、天气良好的条件下可以采集到清晰的画面,但是在夜晚、雨雪天气和浓烟浓雾遮挡的情况下,它们就很难获取有效的目标信息了。而往往在这些极端条件下的应用才是需要关注的重点,因此只使用单一的可见光传感器已经不能满足需求。
机载激光成像雷达系统在机载激光成像雷达系统中,激光成像雷达系统安装在飞行器的水平平台上。激光成像雷达通过激光波束扫描的方式测量飞行器到地面上激光光斑中心点的斜距;在飞行器飞行过程中,扫描光学系统按照固定的下视角、以一定的频率进行等角度的光束输出,完成激光束的横向扫描,得到一行扫描数据,而激光束的纵向扫描则通过飞机器的航向飞行实现;通过横向扫描和纵向扫描可以得到飞行器到下方多行地形采样点之间的距离,进而构成飞行器下方地形的距离图像。2
图像预处理图像是指能在人的视觉中产生视觉印象的客观对像,是对现实物体的真实反映,是人们认知世界的重要途径。使用不同的传感器采集图像会得到不同的图像,当使用 CCD 相机采集图像时我们会得到可见光图像,当使用红外热像仪采集图像会得到红外热象图,多传感器地面目标识别就是利用特定的传感器在特定的应用场景下对目标成像,然后通过图像处理和机器视觉的方法对目标物体进行检测与识别。在这过程中,无论采集到的是可见光图像还是红外热图像往往都会含有部分噪声,所以在进行图像目标识别之前我们需要对图像进行图像灰度化、图像去噪处理。在对图像进行去噪预处理之后,需要使用运动目标检测方法在图像中提取目标所在区域等一系列处理。
地面目标识别分类算法在进行地面目标进行识别的过程中,最关键一个步骤是构建目标分类器。从两类模式分类技术的角度出发研究图像序列中地面目标的识别问题,假设以车辆作为地面目标研究对象,所以需要构建车辆分类器。
分类是图像识别中的关键问题,它通过训练分类器,在特征空间中完成不同类别的划分,将特征相似的样本归为一类。利用Haar-like特征以及利用积分图像快速计算特征值,从大量的车辆样本图像中提取该特征后,我们就要思考如何利用这些特征构建分类器,这是地面目标识别系统中至关重要的一步。
目前用于车辆识别的分类器训练算法主要有:支持向量机SVM、Ada Boost学习算法和神经网络,如表所示。
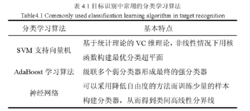
SVM 支持向量机支持向量机具有很强的泛化性能,同时,它主要是来解决一个凸规划问题,其求得的局部最优解也就是全局最优解,能够有效避免过度学习的情况。支持向量机算法训练分类器基本原理可以理解为:将待学习的样本数据使用某种非线性函数投影至高维空间,然后通过在这个空间里建立分类超平面,最终使所有样本在这个空间里可分。投影函数是由待分类样本组成低维向量和它们所构成特征空间的内积确定,并且这个内积也可由样本空间的某种核函数替换,如此就能够快速的构造特征空间中的分类超平面,从而避免“维数灾难”,因此,支持向量机对高维特征的分类问题具有十分优异的性能。
Ada Boost 算法理论Ada Boost 算法是机器学习领域又一种重要的特征分类算法,已被广泛应用于人脸检测和目标识别。它的主要原理是通过迭代的方式,对同一个训练样本集进行迭代训练,每一轮训练都形成弱分类器,然后将形成的弱分类器级联,形成最后的强分类器。简单来说如果用一个特征分类效果不好,那可以多找几个特征,把这几个特征级联起来就可得到逐渐增强的分类器。
改进的 Ada Boost 算法因为 Ada Boost 算法对分类错误的样本进行加权处理,在下一轮的迭代训练中这些样本将被重点学习分类,所以 Ada Boost 算法有着较强的分类能力。可是,一旦分类训练中出现大量的错分样本,那么该算法就会着重处理这些难以分类的样本,这样就降低了 Ada Boost 算法的分类性能。为了解决这个问题,Friedman 等人提出 Gentle Ada Boost 分类算法,简称 GAB,GAB 算法有着较高的稳定性,并且弱分类器的权重一直是1。
地面目标库的建立要识别地面目标,需要对地面目标进行分类学习。如前文介绍使用Ada Boost 迭代算法根据目标图像的 Haar-like 矩形特征进行分类学习,需要大量包含目标的正例样本和不包含目标的反例样本,此外为了评估分类器的性能还需要很多测试样本,因此针对可见光和红外图像分别建立了地面目标库。
由于图像 Haar-like 矩形特征的提取容易受到噪声、光照强度以及红外辐射强度不一的干扰,因此在提取特征之前需要对样本进行预处理。预处理过程主要包括(1)使用平滑滤波对样本进行去噪;(2)将彩色图像样本做灰度变换转化为灰度图像;(3)图像灰度归一化。3
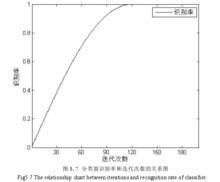
分类器的训练准备好正例样本和反例样本后,就需要运用迭代算法对样本进行分类学习。整个训练过程是在PC 机上训练一定时长左右,当迭代次数达到一定时,由每轮迭代生成的弱分类器级联成的强分类器将不同类别样本完全分开,停止训练。
分类器对训练样本的识别率和迭代次数的关系如下图所示。
应用人们对智能检测和目标识别的技术需求越来越大,汽车辅助驾驶、智能交通监控等领域的核心是自动检测和识别某些应用场景内的存在的地面目标。3
军事上,地面目标识别技术是精确制导武器的关键技术。现代化战争要求精确制导武器能够准确打击目标、智能攻击目标、提高发射平台的生存能力,该技术是实现这些目标的重要前提。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国