

机器人与运动物体接触的过程包括非接触、接触过渡和接触3个部分。对于机器人与高速运动目标接触等存在较大冲击的应用实例,进行有效的非接触阻抗控制是实现机器人稳定、安全作业的必然要求。这方面的研究是实现机器人捕捉运动物体的关键技术,在工业、军事和航天等领域均有重要意义。
所谓非接触阻抗,就是当机械臂与目标尚未接触时就调节机械臂的阻抗以避免过大的冲击和稳定地操作目标。主要是将阻抗控制的理论与机器人视觉控制结合起来。
发展背景Ami等针对多移动机器人,提出了虚拟阻抗的概念。他们在机器人之间,机器人与目标和障碍间定义了虚拟阻抗。利用虚拟阻抗产生虚拟力实现多机器人的协调控制。Nakabo在虚拟阻抗的基础上提出了视觉阻抗的概念,即将视觉反馈信息与阻抗控制相结合,对机器人末端执行器的阻抗进行控制以完成特定的任务。他们首先提取出图像特征,简历一虚拟接触面,将视觉信息以图像雅各比矩阵的形式应用到阻抗控制公式中,计算与虚拟表面接触时末端执行器应保持的理想阻抗。通过控制系统加以实现。1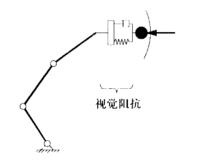
视觉伺服技术是非接触阻抗控制问题涉及的一项关键技术。视觉伺服,指采用闭环的方式,通过不断地视觉反馈,来控制机器人的运动。这和早期视觉机器人采用开环的先“看”后“动”的方式有着极大的区别。近年来,视觉伺服技术取得了许多有意义的研究成果和应用实例。理想情况下,视觉伺服系统应该是系统动力学水平上的反馈伺服系统,但目前国内外还没有动力学水平上的视觉伺服系统。因为一方面,对视觉伺服中涉及的动力学理论问题研究还不充分,许多问题悬而未决。另一方面,要真正实现视觉伺服就必须使视觉系统的处理速度与运动控制系统相当,同时解决视觉信号的滤波问题。在分解速度控制的思想基础上,我们提出一种基于分解速度控制的视觉伺服方案。其实质是运动学水平的视觉反馈控制。这时,只要求图象处理的速度与某一层次的运动学规划速度相当。1
现有理论不足之处视觉处理的实时性限制尚未充分考虑由于视觉处理的实时性限制,目前阻抗控制所处理的对象大多为低速问题。如避障,其目标是防止机器人与物体接触。一些涉及到运动日标抓取的系统也井未就冲击控制的问题展开深入地研究。
事实上,高速运动接触对期望接触阻抗特性参数的要求很高。而期望阻抗特性参数的选择与目标的动量、接触速度和机器人末端表现出的惯性特性都有关。
接触惯性特性研究不足在已有的机械臂接触运动物体的研究中,方法集中在通过非接触阻抗控制控制机器人和目标的接触速度上,而对调节机器人的接触惯性特性研究不足。实际应用中,由于冲击作用的时间很短,如果在机器人高速运动中控制接触,系统受力传感元件、控制执行元件的时延影响。因此很难实现接触阻抗控制的性能日标。
智能控制体系的研究对实际应用应当是把诸多的影响机器人与物体接触的因素加以统一考虑,势必要求研究某种实时运动控制机制来进行多因素协调的控制。而这方面的研究还未见报道。
应用前景这方面的研究是实现机器人捕捉运动目标的关键技术,具有重要的应用意义。最明显的应用前景就是太空捕捉卫星机器人。随着太空技术的发展,太空服务或轨道服务的重要性凸现出来。1984年4月月由NASA的STS-4IC号任务完成了人类第一次卫星服务。在1992年5月的STS-49号任务中,为捕捉一颗未进入预定轨道的卫星,3位宇航员在舱外连续工作了8小时29分,创下了美国太空行走的记录。此次任务告诉人们由宇航员来接近和捕捉正在旋转的卫星是多么的危险和困难。此后,人们意识到应该应用机器人对商业卫星进行营救、修理、补充燃料和日常维护。
另一个具有前景应用领域是抛接机器人。传统的机器人移动物体的方法是抓取、移动、放下,可达范围必须在机器人的操作范围内。而人类为扩大操作范围,常常会利用物体的惯性以及周围的环境,运用各种手段,如抛接、滑动、碰撞和反弹等等,其实现的关键环节也是捕捉运动物体。此外,该项技术还可以应用在太空系统的对接、空中和海上加油,抓取装配线传送带上在运动的零部件,垃圾自动分捡和机器人打球等场合。上述应用中,都涉及到如何在接触的过程中,既保证物体稳定的操作(抓取或打击),又要保证不损坏物体和机器人本身。因此,与运动目标安全、稳定的接触显得格外重要。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国