

矢量控制
交流电机调速系统的矢量变换控制技术是世纪年代开始迅速发展起来的一种新型控制思想。它通过将定子电流分解成相互独立的励磁电流和转矩电流,从而使交流电动机在很大程度上类似于直流电动机,大大简化了控制的难度,并获得了较好的控制效果。使得这种控制方法成为交流电机获得理想调速性能的重要途径。控制系统的主要模块有速度调节模块,矢量变换模块,磁场定向角计算模块,电机模块等组成。
发展背景在直接矢量控制系统中,系统不仅复杂,控制效果也不是很好。在这种情况下,日本人就提出了一种间接矢量控制方法。这种控制方法比较简单,不需要进行磁通检测,而像通常的转差控制方法一样,只要测出电动机转子的角频率,加上根据需要的转矩推算出应有的转差角频率,以此控制定子电流的瞬时角频率,就能使电动机的电流和转矩迅速由原先的工作状态变到新的所需的工作状态。
间接矢量控制如果在控制过程中,只要能使电机定子、转子或气隙磁场中有一个始终保持不变,电机的转矩就能和稳态工作时一样,主要由转羞决定。按照这个想法,就可以从转子磁通直接得到定子电流轴分量的给定值,在通过对定子电流的有效控制,就形成了转差矢量控制,避免了磁通的闭环控制。这种控制方法也称间接矢量控制,不需要实际计算转子磁链的幅值和相位,用转差频率和测量的转速相加后积分来估计磁通相对于定子的位置,结构比较简单,所能获得的动态性能基本上可以达到直流双闭环控制系统的水平。1
原理下图为用于矢量控制的向量图。
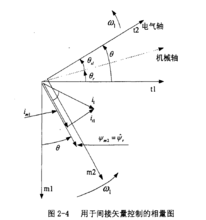
根据旋转坐标系M2-T2的等效电路,可以写出下列方程:


另外,还有如下方程:


对于解耦控制,最好是:


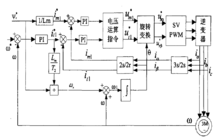
下图是间接矢量控制的系统结构图。
与直流矢量控制对比间接矢量控制的最主要优点在于不需要安装复杂的磁通传感器。间接矢量控制现已成为高性能异步电机控制的通用方法。但是间接矢量控制方法的磁通位置角的计算是基于前馈方式,通过电机数学模型的分析来获得位置角的计算公式,所以其不可避免的依赖电机参数,使其对电机参数的变化非常敏感。事实上,由于转子时间常数估计的不准确性使定子电流矢量和转子磁通并不在同一个轴上,而是有一定的偏差,这就不可避免的使定子电流的力矩分量和磁通分量不能完全解祸,影响整个系统的性能。当稳态的磁通幅值跟参考幅值存在一定偏差的时候,就会出现力矩的迟滞响应,这会导致在磁场增加的时候磁场饱和或在磁场幅值减小时力矩减小。因此,在高精度的场合,为了精确的估计转子时间常数,在间接矢量控制第一次启动时,一个长而准确的过程是必须的。而且,一般电机转子电阻随时间的变化较大,为了保持系统良好的动态性能,必须进行转子时间常数补偿。为了辨识转子时间常数,人们发明了各种各样的方法,典型的有波形估计的卡尔曼滤波算法,基于状态观测的各种状态观测器,基于自适应理论的模型参考自适应等。过去,由于计算机硬件的限制,很多巧妙的方法由于存在复杂的算法难以实现,但随着高速处理器,特别是芯片的广泛使用,很多算法得以实现,进一步加强了转子时间常数辨识方法的进一步研究。
直接矢量控制方法是基于对磁通实际位置的检测,由于采用磁通传感器比较昂贵,往往直接矢量控制设备比间接矢量控制昂贵许多,而且,由于考虑使用磁通传感器,如互感线圈或霍尔传感器后,必须对电机内部结构进行改造,进一步增加了系统的成本。1
电机参数对间接矢量控制的影响温度变化因数在间接矢量控制中当电机转子电阻发生变化时,转子电阻实际值与控制器的估计值不一致时,将对间接矢量控制的关键参数转差频率的计算产生误差,从而不能准确算出转子磁链的位置,使整个系统不能完全解祸,影响对电机电磁转矩的控制,从而使整个控制系统性能恶化,因此,在实际运行中必须考虑温度补偿策略。
频率变化因数在矢量控制时,电机的调速是通过改变频率来实现的,为了改善异步电机的起动特性,转子往往会采用一些特殊的槽型。由于集肤效应,随着转子频率与电流量的分布变化,使转子参数也会发生变化,实验证明,转子槽深越大,随着频率的增大,其电阻将大幅度增大,而电抗大幅度减小,因此,等效电路参数从短路实验测得的电感必须考虑集肤效应。要想获得精确测量,应把测量频率降低到实际运行时的频率下进行。
磁路饱和因数励磁电抗是由气隙长度与铁心磁路饱和程度来决定,在一定的输出范围,当主磁通减少,磁路的饱和程度降低时,励磁电抗将会增大,除此之外,转子电阻与转子漏抗也会受磁路饱和程度的影响,当负载电流流过转子导体,转子铁心发生磁路饱和时,由于漏磁通的作用同样会产生集肤效应,使转子电阻增大,漏抗下降。
杂散损耗因数要达到高精度控制,杂散损耗也不能忽略,一般杂散损耗约为额定输出的0.5%,但是当过载150%运行时,杂散损耗将上升为额定输出的10%,这时就必须考虑修正,而这是利用电机等效电路要研究的一个新课题。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国