

基本概念
多模型控制器于70年代被提出,主要用于解决参数不确定系统的控制问题。主要是对被控对象建立多个模型,覆盖其参数不确定性,利用输出误差求取加权值,然后通过加权求和的形式求取控制器,但其稳定性很难证明。多模型控制在解决非线性及各种复杂系统控制问题中己经得到深入研究,并在飞行器控制、故障诊断、化学化工等许多领域得到广泛的应用。多个模型之间的切换次序、切换过程的稳定性、模型的数量是设计多模型切换控制系统的关键。
基本思想切换的思想首先由Martensson提出,主要有两种切换方法:
第一种是直接切换,首先根据被控对象的参数不确定性建立多个控制器,下一个控制器的选择是预先知道,基于切换函数逐一切换,直到稳定的控制器,滑模变结构控制就是这一类切换。
第二种方法是间接切换,每一采样时刻根据性能指标切换函数值选择与实际被控对象最接近的模型,并将基于此模型的控制器切换为当前控制器。本文主要论述这种方法。
因为在一段时间内仅有一个控制输入,任何控制器性能只有在使用才能计算,而辨识模型的性能是每一步并行计算,因而性能指标必须基于模型性能而不是控制器的性能。在实际运行中,通过性能指标判断模型集中那个模型与被控对象最为接近。通过开关切换至该模型对应的控制器中。
结构基于切换的多模型控制结构如下:
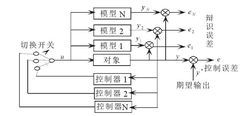 图1
图1
基于多模型的智能控制方法是通过在s个局部控制器之间切换来实现。根据多个不同模型的翰出,依据切换控制策略来适应被控对象的参数突变,同时保证了闭环系统的稳定性和输出跟踪误差的渐近收敛性1。
模型切换性能指标切换性能指标在多模型自适应控制中是用来判断和选择最佳模型及相应的控制器,因此性能指标要能够最准确地反映过程与模型的匹配程度。
首先,我们可以从对象优化的角度看,选择恰当的性能指标。
二次型性能指标基于跟踪调节的二次型性能指标:

性能指标选取的是实时误差和历史误差的加权,历史误差数据是“无限记忆”,从最优的角度衡量模型与被控对象的匹配程度。与传统线性二次调节器的区别在于这个最优性能指标不是用来设计控制器,而是用来衡量模型与对象的接近程度,其中误差 为辨识误差。
为辨识误差。
ITAE性能指标基于ITAE准则的性能指标(或基于ITAE准则的性能指标):

在以上两种性能指标中包含两项:时间t和辨识误差 。其中辨识误差 反映了辨识模型与实际对象的匹配程度,时间t保证系统快速稳定的切换至最佳模型。
其次,基于真实值与模型值的接近程度的思想,提出切换性能指标作为某种距离的度量。
积分型性能指标由Yale大学的Narendra首先提出一种积分型性能指标:

其中 为第i个辨识模型与实际对象的误差,
为第i个辨识模型与实际对象的误差, ;
; 和
和 分别为暂态内和记忆长度的加权因子,侧重于性能指标的实时和长期匹配程度,
分别为暂态内和记忆长度的加权因子,侧重于性能指标的实时和长期匹配程度, 为遗忘因子,它决定了指标存储能力和保证
为遗忘因子,它决定了指标存储能力和保证 的收敛性,合理的选择入可以获得很好的性能指标。
的收敛性,合理的选择入可以获得很好的性能指标。
1-范数性能指标
其中 >0为现在时刻误差的权重, >0为过去时刻误差组合的权重, 和 数值确定现在时刻误差和过去时刻。
误差组合对性能指标的相对重要程度,遗忘因子 表示性能指标的记忆效果,L为所取的过去时刻误差组合的长度。遗忘因子的合理选择可以部分消除初始状态偏差,外部干扰等因素的影响。
表示性能指标的记忆效果,L为所取的过去时刻误差组合的长度。遗忘因子的合理选择可以部分消除初始状态偏差,外部干扰等因素的影响。 为1一范数。同理,也可以选取任意范数作为性能指标2。
为1一范数。同理,也可以选取任意范数作为性能指标2。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国