

简介
地形跟踪飞行控制系统,又称地形跟随飞行控制系统。
地型跟随是在保证飞机的隐蔽性,安全性及乘员的舒适性的条件下,让飞机采用全自动的方式跟随高低起伏的地形,由于地形的分类极为复杂,飞机要采用全自动的方式跟随地形,必须事先根据机上雷达的地形采样计算出最优参考轨迹,否则飞机的飞行将是盲目的,更谈不上“全自动”。目前,计算最优参考轨迹的方法有多种,如以经典控制理论为依据的适应角法、样板法等,以及以现代理论为基础的三次样条法。
在地形跟随系统中,当根据实际地形规划出飞机的最优参考飞行轨迹后,我们所面临的关键问题就是设计出合理的控制器使飞机沿参考轨迹飞行。1
实现方法现今无人机在高度保持的控制方法上,主要依赖气压传感器。无人机利用气压传感器测得的飞行高度,通过主控芯片处理,并经由多级 PID 反馈控制器传递,最终实现无人机的高度保持。但是单纯依赖气压计的定高策略不能够测得无人机与地面间的相对距离,以至无法实现地形的跟随保持。另一方面,为了弥补气压计在距离测量上的缺陷,一些研究机构和公司在无人机气压定高的基础上安装了特定的距离测量传感器,这些测距传感器利用不同的测距原理来测量无人机的对地距离,以实现地形跟随的功能。
利用测距传感器实现地形跟随的方法主要有超声波法、激光/红外法以及视觉法。
超声波法超声波法是利用超声波来探测物体的位置。超声波传感器发射超声波,超声波遇到物体后返回,利用超声波往返的时间差来求得距物体的距离。超声波法的成本低,实现方法简单,是无人机地形跟随中常用的测距方法。但是超声波传感器的采样频率低,受吸音材质影响较大。另一方面,单超声波传感器由于超声波的方向性不好会存在测量盲区,而多个超声波传感器同时使用会产生一定串扰。

激光/红外法激光/红外法是通过电磁波来探测物体的位置,电磁波在发射和接收过程中会产生时间差或相位差,传感器利用时间或相位的变化来进行距离测量。其中,激光传感器的光束集中,方向性好,弥补了超声波测距在方向性上的不足,并且激光测距的精确度很高。但是,激光传感器成本高,设备体积大,功耗高,不适合在小型无人机上使用。红外传感器与激光传感器类似,使用不同频率的红外光进行测距。近些年在传统红外传感器的基础上发展出了基于近红外光的 TOF 传感器,TOF 传感器测量距离远,精度高,已被广泛应用于各行各业。
视觉法视觉法是近些年兴起的一种新的测距方法。无人机通过摄像头采集周围环境的图像信息,并通过图像算法得到自身与被测物体间的距离。视觉法一般使用双目摄像头,或利用单个摄像头前后帧图像的对比来计算到物体间的距离。视觉法具有探测范围广,同时可以获得物体形状、速度等信息的优势,这些优势在无人机自主飞行研究方面有着重要的价值和意义。但是图像数据在后期处理中,由于特征提取、边缘锐化等图像算法较为复杂,计算量大,对飞控系统的处理器要求较高。而且,视觉法受现场光线强弱的影响很大,在实际应用中,常将视觉法与其他方法进行组合使用,以完成复杂的飞行任务。2
算法设计在地形跟随的控制方法中,最常用的是经典的PID反馈控制法。PID 控制器原理简单,使用方便,适应性和鲁棒性都非常强;同时,PID 控制器使用时不需要精确的数学模型,所以非常适合无人机地形跟随这种飞行环境不确定,数学模型不精确的控制场景。
地形跟随算法的主程序包括传感器数据的采集,多传感器数据的融合,以及利用三级 PID 控制器对无人机的跟随飞行进行控制。地形跟随主程序作为飞行控制系统的子系统,运行在飞控系统的主循环中,和飞控系统协同工作。3
飞机控制系统飞行控制系统,简称飞控系统,是飞行平台的核心,它的主要功能是保持飞机正常的飞行姿态。通过飞控系统的有效工作,飞机可以在空中保持自身姿态与航迹的稳定而不受环境的干扰;同时按照地面指令的要求,改变飞机的姿态与航迹。一个合格的飞控系统是实现地形跟随的基础。
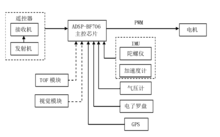
飞行控制系统包括机载硬件系统、机载控制系统和地面控制系统。飞控系统的机载硬件系统包括了主控芯片,惯性测量单元及气压计等多种传感器,以及外围相关电路。并通过外部扩展接口和相关总线协议,连接电子罗盘、GPS、测距传感器及视觉传感器等外接模块,进一步增强飞控系统的工作能力。飞控系统的传感器用于测量飞机的位置、速度、加速度以及角度等状态信息,并将这些信息传递给主控芯片进行信息处理,最终形成控制信号,作用于伺服电机,控制飞机的稳定飞行。3
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国