

间接矢量控制
如果在控制过程中,只要能使电机定子、转子或气隙磁场中有一个始终保持不变,电机的转矩就能和稳态工作时一样,主要由转差决定。按照这个想法,就可以从转子磁通直接得到定子电流轴分量的给定值,在通过对定子电流的有效控制,就形成了转差矢量控制,避免了磁通的闭环控制。这种控制方法也称间接矢量控制,不需要实际计算转子磁链的幅值和相位,用转差频率和测量的转速相加后积分来估计磁通相对于定子的位置,结构比较简单,所能获得的动态性能基本上可以达到直流双闭环控制系统的水平。1
间接矢量控制系统间接矢量控制系统是以间接矢量控制为主要控制策略的工作系统,间接矢量控制系统稳定,转速可调且跟踪能力较强,系统无超调,启动快,过渡过程较短。总体上看,间接矢量控制系统静、动态性能较优良,系统结构简单,不需要进行转子磁链的测量,降低了系统对转子参数的依赖性,避免了因观测不准确而引起的误差。系统具有基于稳态模型转差频率控制系统的优点,同时用基于动态模型的矢量控制规律克服了它的大部分不足之处。
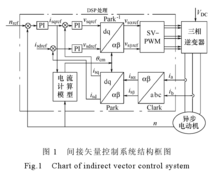
系统结构下图为间接矢量控制系统结构框图。它具有速度反馈和电流反馈,采用空间矢量脉宽调(SVPWM)策略。间接矢量控制的速度调节器、电流解耦、转子磁场定向、电流调节器以及SVPWM都是通过数字信号处理器(DSP)实现的,即实现了全数字处理。2
磁链闭环控制的矢量控制系统中,转子磁链反馈信号是由磁链模型获得的,其幅值和相位都受到电机参数Tr和Lm变化的影响,造成控制的不准确性。既然这样,与其采用磁链闭环控制而反馈不准,不如采用磁链开环控制,系统反而会简单一些。在这种情况下,可利用矢量控制方程中的转差公式,构成转差型的磁链开环矢量控制系统——间接矢量控制系统。它继承了基于稳态型转差频率控制系统的优点,又利用基于动态模型的矢量控制规律克服了它大部分的不足之处。
以异步电动机间接矢量控制系统为实例介绍间接矢量控制系统的组成。它主要由控制与运行模块、功率变换模块、检测采样模块三个部分组成。
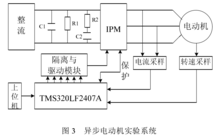
功率变换电路IPM 内部封装了 6 只IGBT 及其驱动电路,需4 组独立的电源供电;包含了性能优良的内置保护电路,保护功率器件,主要有欠压锁定、过热保护、过流保护、短路保护等,只要任一种保护电路动作,都会封锁 PWM 脉冲。
电流和转速采样电路电流采样电路用来将传感器检测的电流转换成二进制代码,本实验平台选择霍尔传感器,精度较高,可检测任意波形的电流。转速检测电路采用每转1024个脉冲的增量式光电编码器。输出的两路正脉冲信号经电平转换后接到DSP的编码器接口QEP1和QEP2;利用DSP信号处理电路得到4倍频信号,即每转4096个脉冲,分辨率提高。同时计算电动机的转速。
控制与运行模块采用TI公司的16位DSP芯片TMS320LF2407A作为系统的控制核心,负责电流和转速的采用和处理,并应用间接矢量控制算法得到PWM控制信号,经过功率放大和光电隔离,驱动IPM内的器件;当系统出现短路、过流、过压和过热等故障时,封锁PWM信号。3
优点交流电机高性能调速系统中,间接矢量控制系统控制方法比较简单,不需要进行磁通检测,而像通常的转差控制方法一样,只要测出电动机转子频率,加上根据需要的转矩推算出应有的转差频率,以此控制定子电流的瞬时频率,就能使电动机的电流和转矩迅速由原先的工作状态变到新的所需工作状态。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国