

研究背景
角速度是描述物体运行状态的重要参数,分为倾角角速度和旋转角速度。通过对瞬时角速度的测量,可以监测物体的运动状态,从而对其运动姿态进行控制。目前,角速度测量已经在汽车、军事、航天、工业、电子等多个领域得到了广泛的应用。
近年来关于倾角角速度传感器的研究主要包括磁流体动力学角速度传感器、微热对流角速度传感器、新型MEMS 仿生三维角速度传感器和基于Coriolis 效应的微机械陀螺等。
由于旋转机械的应用领域更为广泛,因此旋转角速度检测装置的使用范围也更大。目前测量旋转机械瞬时角速度的装置主要是测速发电机,测速发电机分直流、交流测速发电机两大类。
直流测速发电机由于电刷接触电阻和电枢反应的影响,其输出特性的线性误差较大,约为0.3%左右,且存在低速失灵区和纹波影响;
交流测速发电机不存在电刷接触电阻产生的影响,但运行时由于转子漏阻抗和激磁绕组漏阻抗的影响,同样导致其输出特性的线性误差较大; 此外,由于交流异步测速发电机的两相定子绕组不完全垂直,或是气隙不均,磁路不对称,亦或是空心杯转子的壁厚不均以及制造杯型转子的材料不均,会造成一定的剩余电压。
基于此,研究了一种无刷式测速发电机。1
结构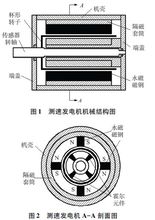 无刷式测速发电机的机械结构如图1、图2 所示,其中图2 为图1 对应的A-A 剖面。发电机主要包括转轴、杯形转子、隔磁套筒、永磁磁钢、机座、内外定子和霍尔元件。
无刷式测速发电机的机械结构如图1、图2 所示,其中图2 为图1 对应的A-A 剖面。发电机主要包括转轴、杯形转子、隔磁套筒、永磁磁钢、机座、内外定子和霍尔元件。
其中测速发电机的外定子通过外隔磁套筒固定在机座的内侧; 永磁磁钢嵌放在各部分之间的夹槽中; 内定子通过内隔磁套筒与右端盖固定,内隔磁套筒中心位置设有通孔,霍尔元件嵌放在各部分之间的夹槽中; 杯形转子的杯壁置于内、外定子之间的空气隙中; 内定子之间的霍尔元件与外定子之间的永磁磁钢,在空间相互错开45°角。1
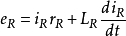
工作原理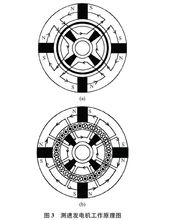 外定子中的永磁磁钢产生的磁场分布情况如图3 所示,磁力线经过外定子、空气隙、杯形转子和内定子后形成闭合回路。由于永磁磁钢与霍尔元件的安装位置在空间上错开45°角,因此永磁磁钢产生的磁场与霍尔元件不存在交链。
外定子中的永磁磁钢产生的磁场分布情况如图3 所示,磁力线经过外定子、空气隙、杯形转子和内定子后形成闭合回路。由于永磁磁钢与霍尔元件的安装位置在空间上错开45°角,因此永磁磁钢产生的磁场与霍尔元件不存在交链。
当杯形转子静止时,如图3( a) 所示,由于永磁磁钢产生的恒定磁通没有穿过霍尔元件,因此霍尔元件不产生霍尔电势; 当杯形转子开始转动时,即存在瞬时旋转角速度,如图3( b) 所示。此时杯形转子开始切割永磁磁钢的恒定磁通,将杯形转子的杯体看作是很多根的导条,则根据法拉第电磁感应定律,杯形转子中产生与瞬时角速度对应的感应电动势。1
假设杯形转子的旋转方向为逆时针,则根据右手定则,杯形转子产生的感应电动势方向如图3( b)所示。感应电动势产生相应的短路电流,短路电流的方向与感应电动势的方向相同。此时短路电流会产生对应的磁场,如图3( b) 所示,该磁场经由内定子、霍尔元件、空气隙、杯形转子和外定子后形成闭合回路。1由于该磁通与霍尔元件匝链,则根据霍尔效应,霍尔元件产生相应的霍尔电势。2
数学模型输出特性1、根据磁路的欧姆定理,永磁磁钢产生的恒定磁通量为公式(1):

式中
Fp——为永磁磁钢的磁势;
RmP——为永磁磁钢产生的磁通所经过磁路的磁阻。
2、根据法拉第电磁感应定律,当杯形转子以瞬时旋转角速度Ω 逆时针切割永磁磁钢的磁通时,产生的切割电动势为公式(2):
 Ω
Ω
式中
Ce——为与杯形转子结构相关的常数。
3、根据欧姆定律,杯形转子导条中产生的电流为公式(3):

式中
rR——为杯形转子的等效电阻。
4、根据磁路的欧姆定理,杯形转子4的电流产生的磁通量为公式(4):

式中:
NR——为杯形转子的等效匝数;
RmR——为杯形转子电流产生的磁通所经过磁路的磁阻。
5、根据霍尔效应可知,霍尔元件产生的霍尔电势为公式(5):

式中
KH——为与霍尔元件结构和性质相关的常数;
I——为霍尔元件的控制电流。
6、联立上述公式(1)~(5)即可得到公式(6):
 Ω
Ω
由式( 6) 可知,霍尔元件的电势与杯形转子的瞬时旋转角速度成正比。1
传递函数当杯形转子的瞬时角速度发生变化时,杯形转子中的电流也会发生变化,由于杯形转子存在电抗,根据基尔霍夫电压定律,杯形转子的电压平衡方程为公式(7):
 联立式( 1) ~ 式(7) 可得公式(8):
联立式( 1) ~ 式(7) 可得公式(8):
 Ω
Ω
由此可得测速发电机的传递函数为公式(9):
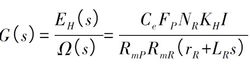
由此可知,由于杯形转子电抗的存在,测速发电机为一阶惯性环节,其时间常数为LR /rR,因此可选用电阻率较大的材料制作杯形转子。以改善测速发电机的动态特性。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国