

简介
由若干航天器在空间轨道以编队飞行方式,提供一个分布敏感器(有效载荷)系统,目前在空间科学、国防、商业等方面获得了应用并得到迅速发展。特别是编队飞行技术在空间观测(或空间遥感)方面的应用,预计今后10一15年间将发生一场重大技术革命。
一般来说,航天器编队飞行轨道构型是按照编队飞行应用要求来设计的,但是实际中存在一定的困难,因为形成编队飞行轨道构型和保持构型队形是需要付出代价的(主要是在燃料方面)。对航空方面,飞机可以实现任何编队飞行构型,原因是飞机可以飞回地面加油,不担心燃料问题,而航天器尚未能实现空间在轨加注燃料;另者机上有经验丰富、训练有素的驾驶员,而航天器控制技术尚未达到高精度、全自主的水平。为此目前航天器编队飞行轨道构型及其应用正在被积极探讨。主动开展有关编队飞行轨道构型的研究,为编队飞行应用提供更多选择余地,也是当前空间控制一项重要研究课题,任何编队飞行轨道构型都应该考虑其实现的可能性。
分类编队飞行动力学有多种模型,为了便于分析,这里选用线性模型-C-W方程,其他模型用于校核。取目标航天 器为参考航天器,建立相对运动坐标系,坐标系定义为x轴沿参考航天器背向地心方向,Y轴在轨道面内垂直x轴指向飞行方向,:轴由右手法则确定。C-W方程表示如图。
器为参考航天器,建立相对运动坐标系,坐标系定义为x轴沿参考航天器背向地心方向,Y轴在轨道面内垂直x轴指向飞行方向,:轴由右手法则确定。C-W方程表示如图。
编队飞行轨道构型分类:
1)自然式轨道构型:利用各种不同初始条件来组成各种轨道构型。
2)强迫式轨道构型:利用各轴推力器的推力,强迫组成各种轨道构型,此时航天器除目标器外,大多是非开普勒轨道。这种强迫轨道构型都是在需要的时间段实现,非永久连续性,因为需要很多燃料。
3)混合式轨道构型:既利用各种初始条件,又应用各轴推力器的作用。1
八面体北京控制工程研究所林来兴提出一种全新轨道构型—八面体,’它是当前多种编队构型的集合,能体现编队飞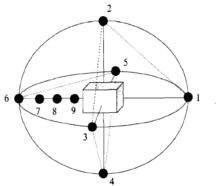 行各种可能轨道构型的特征,同时也是适合作为编队飞行空间演示的轨道模式,而空间演示与技术验证正是当前编队飞行发展的关键时期。
行各种可能轨道构型的特征,同时也是适合作为编队飞行空间演示的轨道模式,而空间演示与技术验证正是当前编队飞行发展的关键时期。
由6颗小卫星在目标星周围悬停,最典型的轨道构型是沿目标星轨道坐标系三轴前后、左右、上下均匀对称分布6颗小卫星,具体构型如图所示。
这种构型称为八面体编队飞行轨道构型,即1-2-3 ,1-2-5 , 1-3-4 , 1-4-5 , 6-2-3 , 6-2-5 , 6-3-4 , 6-4-5共有八面。若每颗小卫星与目标星距离相等,则这种构型也称为球面体轨道构型,球面体半径等于小卫星与目标星距离。
八面体构型是最能体现目前卫星编队飞行各种可能轨道构型的特征,它是多种编队飞行构型集合,例如:
1) 1-2-3-4-5-6为卫星编队飞行逼近、停靠、检查运行模式;
2)圆圈6-3-1-5-6和6-4-1-2-6为圆型立体成像运行模式;
3) 6-7-8-9为接近和软对接运行模式;
4) 1-4-6-2为轨道平面内编队飞行模式;
5) 2-3-4-5为轨道平面外编队飞行模式;
6) 3颗小卫星组成一个平面,共为8个立体成像。
这种八面体轨道构型目前最适合进行编队飞行空间演示和技术验证,空间演示正是当前编队飞行技术发展关键时期。由图所示的八面体轨道构型是由目标器上下悬停的2, 4小卫星和垂直于目标器轨道平面悬停3, 5小卫星,以及在目标器水平方向悬停(或称伴星飞行)1, 6小卫星所组成。
若把八面体轨道构型用于空间试验,则目标器为母星,悬停6颗小卫星可以从母星释放出来,执行试验任务后,可以回收到母星。经过处理和补充(燃料和电力),然后再执行下一次试验任务。
卫星在目标器轨道平面内悬停轨道构型卫星在目标器轨道平面内悬停最典型构型就是在目标器正上方或正下方飞行。在正常情况下由于轨道高度不同,轨道角速度不相等,两颗卫星不可能实现这种飞行。这里提出两个途径来实现悬停构型。
第一种途径:在卫星飞至目标星正上方或正下方时刻,同时施加径向和航向推力,就可以实现悬停编队飞行。
第二种途径:从目标器释放出一颗小卫星,并且具有初速。
卫星在目标器轨道平面外悬停轨道构型卫星在目标器轨道平面外悬停构型最典型的是垂直于轨道平面的悬停,也就是在轨道坐标系x轴上任意一点悬停,此时编队卫星和目标器是平行飞行,实现这种轨道构型有两种途径。
1)第一种途径:从目标器沿z轴分离一颗小卫星,并且具有分离速度,然后当分离小卫星到达B点时,就开始实现悬停。
2)第二种途径:发射一颗小卫星,或者从别处机动过来的小卫星,让其与目标器轨道根数一样(除轨道倾角外)。当小卫星飞到星下点纬度最高的地方时,此时小卫星正垂直轨道平面,其他相对于目标器速度皆为零。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国