

相关概念
1.自适应算法:自适应算法是自适应陷波滤波器的核心内容,以此来控制陷波滤波器的输出,最终达到最优滤波的目的。面临自适应算法的选择问题时,我们首先要了解各种自适应算法的能力和限制;其次要根据应用的需要选择合适的算法。自适应算法基本上存在两种不同的推导方法:随机梯度法和最小二乘估计法。2
**2.传递函数:**传递函数是经典控制理论的数学模型之一。它不仅可以反映系统输入输出之间的动态特性,而且可以反映系统结构和参数对输出的影响。
简介自适应逆控制(Adaptive Inverse Control)是由美国斯坦福大学著名教授B.Widrow于1986年首次命名并提出来的,当时在学术界引起了很大反响,为设计控制系统和调节器开辟了新途径。它是用自适应滤波方法辨识出被控对象的逆模型,串联到对象的输入端作为控制器来控制对象的动态特性,所以称为自适应逆控制。自适应逆控制中的反馈是属于局部反馈,在自适应迭代过程中只用于改变模型参数,并不直接控制主回路中的信号流动,更没有输出到输入的闭环,所以它是开环控制。自适应逆控制系统中的动态特性控制和消除扰动控制是分开来各自独立完成的,互不影响,所以可尽最大可能提高各自的性能。所以自适应逆控制与传统反馈控制和自适应控制在原理上截然不同。
从自适应逆控制的基本理论和方法来看:自适应逆控制涉及到自适应数字信号处理和控制两个学科(交叉),也就是用自适应数字信号处理的方法来研究未知系统自适应逆控制问题。
从所需要的数学基础来看:自适应逆控制主要涉及概率、数理统计和矩阵代数等知识;而自适应控制还需要除此之外的一些高深数学,使广大控制工程师们难以掌握,更难以应用。
从适用范围来看:对象是稳定的和不稳定的;最小相位的和非最小相位的;线性的和非线性的;单输入单输出和多输入多输出等系统的控制问题。并能解决自适应控制所不能解决的问题。3
基本思想自适应逆控制的基本思想就是要用一个来自控制器的信号去驱动对象,而该控制器的传递函数就是该对象本身传递函数的逆。该系统的目的就是要使得对象的输出跟随着指令输入。因为对象一般是未知的,这就要自适应或调节控制器的参数以得到一个真正的对象的逆。按照某一种自适应算法,用对象输出和指令输人之差的误差信号来调节控制器的参数以使该误差信号的均方误差最小。4
原理简单讲,自适应逆控制是利用被控对象传递函数的逆作为串联控制器来对系统的动态特性进行开环控制。或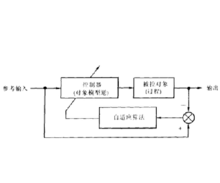 者说,自适应逆控制是要构筑一个控制器直接自适应的控制被控对象(过程),而该控制器的传递函数就是被控对象本身传递函数的逆。其基本结构如右图所示。
者说,自适应逆控制是要构筑一个控制器直接自适应的控制被控对象(过程),而该控制器的传递函数就是被控对象本身传递函数的逆。其基本结构如右图所示。
由右图见,系统控制目的在于使被控对象输出跟随参考输入。但由于被控对象模型一般是未知的,或具有不确定性,因此必须自适应地调节该控制器的参数以便得到一个真正的被控对象的逆。通常是通过某种自适应算法,利用参考输人与对象输出之间的误差信号来凋节控制器参数,使该误差信号的均方误差最小。5
特点与传统反馈控制相比,自适应逆控制采用反馈是为了调整控制器的可变参数,而不是控制系统中的信号流动。在这种情况下,误差信号用来调整控制器参数,而不是直接反馈到对象输入。这种方式避免了因信号反馈而可能引起的不稳定问题。除此,自适应逆控制对系统动态特性的控制和对象扰动控制可分成两个独立的过程来处理。这样,可使系统动态性能达到最优的同时,对象扰动影响也可以减少到最小。也就是可以实现两种控制同时最优。再者,为了使误差最小,控制器的传递函数应该是对象的逆,也就足该对象传递函数的倒数。因此,控制器和对象的级联组合传递函数的增益为1。5

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国