

简介
控制运动噪音是微波着陆系统引导误差信号的一种。当机载设备输出与自动驾驶仪交链时,它将引起航空姿态的改变,并使舵面、驾驶杆发生抖动,但不会使航空器偏离预定的航道或上滑道。
这种误差分量的频率范围方位为 0.3~10 弧度/秒、仰角为 0.5~10 弧度/秒。
背景微波着陆系统(MLS)是当今世界解决各类军民用飞机在复杂气象条件下安全着陆的重要技术装备之一。统计表明,着陆系统的引导误差是飞机安全着陆的关键性因素,为此,国际民航组织(ICAO)在1980年公布了微波着陆系统的精度测试标准。该精度标准是按飞机实际的着陆动态过程将角误差分解为航道跟随误差(PFE)、航道跟随噪声(PFN)和控制运动噪声(CMN)分量。另外,ICAO规定该系统误差是在角数据输出滤波器之后分别用PFE滤波器和CMN滤波器进行测量的。
把 MLS 角误差在频域分解成PFE、PFN 和CMN 三个分量,是考察飞机着陆的实际动态过程后作的结论,它得到了广泛的支持并成为一个标准。在方位上小于等于 0.5rad/s,在仰角上小于等于1.5rad/s 的角误差成分会导致飞机偏离预定航向道(或下滑道),这种称之为 PFE 的分量体现了预定航向道(或下滑道)与飞机跟随角引导信号的实际航道之间的偏差。1
测量方法PFE和CMN误差具体测量方法为:指挥驾驶员按预定航向飞行,同时记录下机载设备从角数据输出滤波器输 出的制导指示数据,并将其与激光跟踪系统或精密雷达跟踪系统测得的飞机绝对基准位置相减,之后分别用PFE滤波器和CMN滤波器输出各自的误差值。
出的制导指示数据,并将其与激光跟踪系统或精密雷达跟踪系统测得的飞机绝对基准位置相减,之后分别用PFE滤波器和CMN滤波器输出各自的误差值。
误差要求进场基准点的方位引导误差要求: ;
;
进场基准点的仰角引导误差要求: ;
;
沿跑道中心延长线上,距跑道入口37km处:
40度方位距跑道入口37km处:
沿跑道中心延长线上,距跑道入口9km处:
40度方位距跑道入口9km处:;2
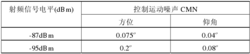
RF信号电平低于-70dBm 时的CMN 精度要求如下图:
减小控制运动噪音的好处1,降低对角度制导空间信号的功率密度要求;
2,放宽对动态旁瓣电平的限制。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国