

背景
自“微网”的概念被CERTS 提出以来,欧美、日本、中国等先后针对交流微网展开了控制方案和运行特性的研究以及示范性工程的建设。相较之下,直流微网的研究起步较晚,然而随着直流型电源和负荷的广泛应用,直流微网在新一代电网中的优势逐渐突显。实际中,采用直流微网的配电形式已在数据中心、船用系统、电动汽车等领域得到成功应用,均体现出直流微网系统效率高、供电可靠性高、经济性高等优点。由于我国当前配电网仍以交流为主,交流型负荷仍占有相当比重,因此在未来一段时间内,兼备上述2 种微网特点的交直流混合微网将成为微网技术的主流方向。
交直流混合微网结构中,分布式电源(distributed generations,DGs)通过电力电子变换器分别接至交流母线和直流母线,2 条母线将整体微网系统分为3 个部分,分别是交流子微网、直流子微网以及交直流互联变换器。在微网系统中,电力电子变换器通常呈并联结构,为此,如何对其功率进行合理分配以确保各台变换器协调运行,始终是微网控制的基本目标。针对交直流混合微网,功率控制技术需要考虑2方面因素:一方面,需要同时保证交流子微网和直流子微网单独运行的要求,即变换器在各自子微网中按照自身容量特性承担相应功率;另一方面,需要确定交直流互联变换器的控制策略,使功率在子微网间合理地双向流动,实现交直流混合微网系统的协调运行。
根据交直流混合微网功率控制的目标,国内外学术界和工业界已从不同角度展开了研究,但至今仍欠缺对其中关键技术进行系统的概括与总结。为全面展示功率控制技术的研究成果,以下分别从交流子微网、直流子微网以及交直流互联变换器3 个方面对已有文献研究现状进行梳理评述。值得注意的是,在对交流子微网、直流子微网功率管理策略进行综述时,通过类比归纳方法,对二者通用之处和各自的特点分别进行详尽的概括。1
子微网通用功率控制技术研究对于交流子微网和直流子微网而言,功率控制目标都是合理配置各自变换器所分配的功率,因此二者许多控制方法在本质上是相同的。以下将对子微网通用的功率控制技术进行归纳分类并评述。2
基于高速通信的控制技术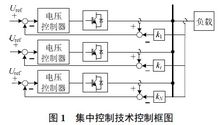 在微网发展初期,学者们通常以系统尺度小作为前提条件进行研究和实验,因此对于变换器间的高速通信互联来说,实现起来相对简单。目前,基于高速通信的控制技术主要包括集中控制技术、主从控制技术以及电流链控制技术。
在微网发展初期,学者们通常以系统尺度小作为前提条件进行研究和实验,因此对于变换器间的高速通信互联来说,实现起来相对简单。目前,基于高速通信的控制技术主要包括集中控制技术、主从控制技术以及电流链控制技术。
一种适用于交流子微网和直流子微网的集中控制方法,控制框图如图1所示。集中控制技术由集中式控制器和本地控制器构成。集中式控制器对总负载电流进行测量,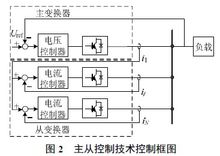 根据并联变换器数量N及各台变换器容量,计算出各变换器输出电流环的参考值,其中Σki=1(i=1, 2…,N),并利用高速通信线发送至各台变换器。本地控制器测量各自变换器的输出电流,对高速通信线提供的参考值进行比较和跟踪。
根据并联变换器数量N及各台变换器容量,计算出各变换器输出电流环的参考值,其中Σki=1(i=1, 2…,N),并利用高速通信线发送至各台变换器。本地控制器测量各自变换器的输出电流,对高速通信线提供的参考值进行比较和跟踪。
区别于集中控制,主从控制技术中不存在集中式控制器,且各台变换器的功能不尽相同。主从控制技术的控制框图如图2 所示,系统中包含一台主变换器及剩余若干从变换器。其中主变换器工作于电压源模式,控制目标是将输出电压稳定于参考值;其余从变换器都工作于电流源模式,控制目标是让自身输出电流跟踪主变换器的输出电流,最终各台输出电流相同,实现电流(等效于功率)合理分配的目的。
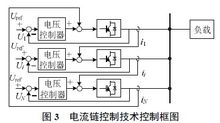 电流链控制也称为3C(circular chain control)控制,其控制框图如图3 所示。在电流链技术控制中,每台变换器包含电压控制外环和电流控制内环,各电压环目的均是将输出电压稳定于额定值;电流环则是控制自身变换器输出电流跟踪上一台变换器输出电流,控制系统呈现环状连接结构。
电流链控制也称为3C(circular chain control)控制,其控制框图如图3 所示。在电流链技术控制中,每台变换器包含电压控制外环和电流控制内环,各电压环目的均是将输出电压稳定于额定值;电流环则是控制自身变换器输出电流跟踪上一台变换器输出电流,控制系统呈现环状连接结构。
上述基于高速通信设计的控制策略,可以快速精确地实现子微网内部功率分配,并确保系统参数工作于额定值。然而在微网向大尺度系统发展的过程中,过于依赖高速通信会引起系统的可靠性问题,并导致投资成本上升。1
无互联通信控制技术目前,关于采用高速通信控制方法的研究已经比较成熟。但随着微网规模的扩大,互联高速通信线会导致系统冗余性下降,成本大幅提升,“即插即用”性能较差,限制了微网的扩展。为此,学者们又提出了无需通信网络的解决方案,在此类方案中,变换器仅需利用各自本地信息即可实现系统功率控制。
1、下垂控制技术
下垂控制是目前应用最为广泛的微网功率控制方法,其满足了可再生能源分布式接入需求,易于实现“即插即用”,同时,冗余程度较高,且降低了系统成本。交流子微网下垂控制模拟了发电机静态特性,采用P-f(有功功率-频率)和Q-U(无功功率-电压)下垂曲线分别实现有功功率和无功功率分配。当变换器输出阻抗与线路阻抗之和为纯感性时,有功功率和无功功率可以表达为
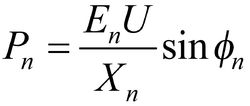
其中:Pn、Qn分别为变换器n 输出的有功功率和无功功率;En代表输出电压;U 代表母线电压;fn是输出电压与母线电压之间的夹角;Xn则表示输出感抗。由式(1)(2)可以看出,当fn足够小时,有功功率的流动主要由功率角fn决定,而无功功率的流动则主要由变换器输出电压En决定。因此,交流子微网中的功率分配管理方法可以表示为
其中:Erated、frated 分别代表变换器输出电压和频率的额定值;mP和nQ分别为有功和无功的下垂系数。
对于不同子微网,下垂控制器均由2部分组成:外环是将反馈的本地信息(电流或功率)代入至预设的下垂曲线,产生输出电压的参考量;内环是常规电压电流环,实现对电压参考量快速准确跟踪。下垂控制之所以能实现无通信网络下的功率管理,本质上是利用电气参数本身(电压、频率)作为变换器相互“沟通”的平台。然而下垂控制需以变换器本地信息(电压、频率)相等作为前提条件。在非理想条件下,上述假设并不成立,从而导致功率分配精度不足和母线电压跌落等问题。
2、小信号注入技术
在下垂控制中,由于无法确保电压信息处处相等,可能会产生功率分配精度下降等问题。为此,Tuladhar 等人采用小幅值交流信号的频率作为变换器统一的通信信息,分别针对交流系统和直流系统提出了小信号注入技术。不失一般性,设需要合理分配的电气参数为G(分别对应交流子微网中的无功功率Q,直流子微网中的输出电流I),变换器注入的小信号频率 的表达式为
的表达式为

其中 是注入小信号的额定频率,BG为对应系数。当微网中对应参数G 分配不均时,由上式可知各变换器输出小信号的频率不同。由小信号频率不同引起的有功功率流动记为pG,变换器根据各自测的pG 给定输出电压的幅值U,如下式所示。
是注入小信号的额定频率,BG为对应系数。当微网中对应参数G 分配不均时,由上式可知各变换器输出小信号的频率不同。由小信号频率不同引起的有功功率流动记为pG,变换器根据各自测的pG 给定输出电压的幅值U,如下式所示。

 上述公式对输出电压进行调节,实际就是改善参数G的分配精度。
上述公式对输出电压进行调节,实际就是改善参数G的分配精度。
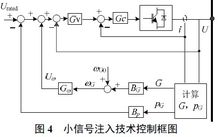
图4为小信号注入技术的控制框图。该技术巧妙地采用小信号频率为通信信息,不会受到线路阻抗等问题的影响。然而,这种方法的测量与实现较为复杂,同时注入的小信号还会降低电能质量,增加线路损耗。1
基于低速通信的控制技术上文围绕基于高速通信的控制技术和无互联通信控制技术进行了归纳和评述。2 种技术均存在弊端:高速通信会降低系统冗余,但舍弃通信网络又会引起精度的不足。为此,学者们又提出基于低速通信的控制技术。该技术对控制精度和系统冗余进行折中,旨在不过于依赖通信网络的同时,确保微网的准确运行。基于低速通信控制一般采用Josep M. Guerrero提出的分层控制结构。在该结构下,底层控制(primary control,通常为下垂控制)仅使用本地信息,这是为了确保通信出现故障时,系统仍能履行基本的功率控制职能;第2层控制(secondary control)针对底层控制的不足,借助低速通信获取更多信息以对底层控制进行补偿;第3层控制(tertiary control)主要实现对外部调度指令的响应并支持经济性运行。
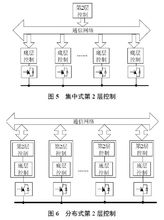 分层控制应用到微网之初,相关文献中普遍采用集中式第2 层控制(centralized secondary control,CSC)的结构。在CSC 结构中,各台变换器将各自信息传递至统一的中央控制器,再由中央控制器根据收到的信息和相应的算法,把补偿信号下发至各台变换器的底层控制器,整体控制框图如图5所示。其中,参数信息和控制信号的传输均通过低速通信网络实现。然而CSC 结构的分层控制依赖于中央控制器,一旦中央控制器出现问题,整个第2层控制都会失效,因此专家们又提出分布式第2 层控制(distributed secondary control,DSC)的结构[35],如图6 所示。在DSC 结构里,第2 层控制被嵌入到变换器控制中,每台变换器都可以视为微网系统中一个相对独立的分布式智能体(agent)。不同的网络拓扑(全局网络结构和局部网络结构)被应用到DSC 分层控制中,其目的都是给所有智能体传递目标参数(电压、频率、电流、功率)的系统平均值(global averages),再根据相应算法向底层提供补偿信号。1
分层控制应用到微网之初,相关文献中普遍采用集中式第2 层控制(centralized secondary control,CSC)的结构。在CSC 结构中,各台变换器将各自信息传递至统一的中央控制器,再由中央控制器根据收到的信息和相应的算法,把补偿信号下发至各台变换器的底层控制器,整体控制框图如图5所示。其中,参数信息和控制信号的传输均通过低速通信网络实现。然而CSC 结构的分层控制依赖于中央控制器,一旦中央控制器出现问题,整个第2层控制都会失效,因此专家们又提出分布式第2 层控制(distributed secondary control,DSC)的结构[35],如图6 所示。在DSC 结构里,第2 层控制被嵌入到变换器控制中,每台变换器都可以视为微网系统中一个相对独立的分布式智能体(agent)。不同的网络拓扑(全局网络结构和局部网络结构)被应用到DSC 分层控制中,其目的都是给所有智能体传递目标参数(电压、频率、电流、功率)的系统平均值(global averages),再根据相应算法向底层提供补偿信号。1
子微网特定控制策略研究虽然交流子微网和直流子微网的大多数功率控制技术在本质上是相通的,但两者间仍存在一些明显差异。下文将围绕交流和直流系统固有差异,对不同子微网的特定控制策略进行归纳评述。1
适用于交流子微网的控制策略研究1、传统下垂控制的变形
在交流系统中通常认为线路阻抗呈强感性,因此传统采用P-f/Q-U 的下垂控制实现功率分配。然而在低压微网中,线路阻抗往往是呈阻性的,有功功率、无功功率表达式为:
2、基于同步触发的控制技术
围绕交流子微网中无功功率分配问题,采用低速通信定时为各台变换器提供同步信号,对Q-U下垂控制进行了修正补充,式(12)为第k 次同步周期变换器的控制方程。其中,方程中第3 项的执行,可以降低无功功率分配误差。然而上述操作虽然减小了分配误差,但同时也导致PCC电压幅值的降低,因此需引入第4 项对电压进行补偿。如果变换器输出的电压均保持在合理范围内,则Gi=0,即不进行电压补偿操作;一旦某台变换器输出电压低于设定值时,电压补偿操作被触发,则Gi=1,即所有变换器的输出电压将同时增加ΔE 以促使PCC 电压上升。

还可以采用低速通信同步触发技术解决无功功率问题。该方法分为2 个阶段进行:第1 阶段,未接收到同步信号,变换器采用传统的下垂控制,与此同时不断计算更新有功功率的平均值(PAVE)以便第2 阶段使用;第2 阶段,接收到同步信号,所有变换器的补偿模块开始工作,PAVE停止更新并保持不变,通过注入有功功率扰动实现了无功功率误差的预测,具体表达式如下所示:

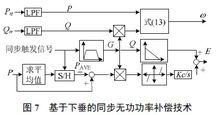 其中:KC是积分增益,所有变换器选值相同;G 为同步增益,在第1 阶段等于0,第2 阶段等于1(启动、停止时均采用斜坡)。同步信号触发时,上式中加入了无功下垂项(nQ∙Qn)作为补偿,无功功率之间的误差会导致变换器输出频率的差异,进而引起有功功率的扰动,而该扰动则会促进式中积分项对输出电压进行相应调节,如图7所示。1
其中:KC是积分增益,所有变换器选值相同;G 为同步增益,在第1 阶段等于0,第2 阶段等于1(启动、停止时均采用斜坡)。同步信号触发时,上式中加入了无功下垂项(nQ∙Qn)作为补偿,无功功率之间的误差会导致变换器输出频率的差异,进而引起有功功率的扰动,而该扰动则会促进式中积分项对输出电压进行相应调节,如图7所示。1
3、虚拟同步发电机技术
由于没有模拟同步发电机的惯性环节,下垂控制呈现小惯性的特点,当功率供需出现缺口时,无法像同步发电机一样利用自身转子的转动惯量抑制功率波动。为此,国内外学者在下垂控制的基础上,加入了虚拟惯性环节,提出了虚拟同步发电机(virtual synchronous generator,VSG)技术。VSG机械方程可表示为

其中:J为VSG 的转动惯量; 为电气角速度;
为电气角速度; 为电网同步角速度;Te、Tm和Td分别为VSG 的电磁、机械和阻尼转矩。电磁转矩Te的表达式为:
为电网同步角速度;Te、Tm和Td分别为VSG 的电磁、机械和阻尼转矩。电磁转矩Te的表达式为:

式中ex和ix分别对应VSG 的电势及输出电流。另外VSG 电磁方程表达式如下式所示,其中:
式中:L 为VSG 的同步电感;R 为同步电阻;ux对应机端电压。事实上,变换器输出滤波电感可以等效为VSG 的同步电感,滤波电感和功率器件的等效电阻可以视为同步电阻,变换器桥臂输出电压可认为是VSG的暂态电势。
有功功率调节是通过对VSG 虚拟机械转矩Tm的调节实现,其由机械转矩指令T0和频率偏差反馈指令ΔT这2 部分组成。
其中:Pref 为有功指令;f 为VSG 端电压频率;f0为电网基准频率;kf为调频系数。
VSG 中加入了J,使得变换器在功率和频率动态过程中具有了惯性环节;另外由于D 的存在,变换器也具备了阻尼功率振荡的能力。3
4、虚拟阻抗技术
虚拟阻抗是微网应用的重要技术,主要实现方式是将输出电流经过特定增益反馈至电压环,表达式如下所示:

通过虚拟阻抗修正变换器在基波域等效的输出阻抗,进而降低线路阻抗阻感比对下垂控制的消极作用,同时减小了因输出阻抗差异造成功率分配误差的影响。然而上述方法加大了系统等效输出的阻抗,进而加重了母线电压的压降。
近年来,越来越多单相负载和非线性负载被接入微网系统,仅采用传统下垂控制已无法实现负载合理分配。为此,负序虚拟阻抗、谐波次虚拟阻抗以及复合式虚拟阻抗等概念也逐渐被学者们提出并应用。
适用于直流子微网的控制策略研究1、DBS (DC Bus signaling)技术
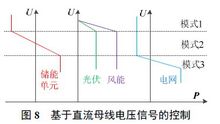 在直流子微网中,直流母线是系统功率平衡的唯一指标。可以采用直流母线电压作为全局信号,实现直流子微网多种微源协调控制。该方法把直流母线电压分为若干区间,包括储能系统、分布式电源、电网等均通过检测直流电网母线电压以判断各自的运行工作模式,并选择相应的控制算法,见图8。需要强调的是,每个区间需至少保证有一个接口变换器采用下垂控制算法,其工作于电压源模式保证系统内功率平衡。直流子微网不同工作区间切换时,系统所有变换器根据直流母线电压信号无缝切换工作模式。
在直流子微网中,直流母线是系统功率平衡的唯一指标。可以采用直流母线电压作为全局信号,实现直流子微网多种微源协调控制。该方法把直流母线电压分为若干区间,包括储能系统、分布式电源、电网等均通过检测直流电网母线电压以判断各自的运行工作模式,并选择相应的控制算法,见图8。需要强调的是,每个区间需至少保证有一个接口变换器采用下垂控制算法,其工作于电压源模式保证系统内功率平衡。直流子微网不同工作区间切换时,系统所有变换器根据直流母线电压信号无缝切换工作模式。
2、虚拟阻抗技术
虚拟阻抗技术也在直流子微网中得到了应用。但与交流子微网不同,直流系统中采用的I-U 曲线下垂系数本身就是虚拟阻抗。
可以分别采用中央控制器、分布式控制器以及模糊控制器,根据储能单元SOC实时调节虚拟阻抗,使SOC较大的单元提供更多有功功率,而SOC 较小的单元承担小部分功率,实现SOC 在分布式储能单元之间的合理分配。1
交直流互联变换器控制策略研究上文总结概括的控制策略可以完成子微网各自的功率控制,而为了实现交直流混合微网系统的协调运行,专家们围绕交直流互联变换器展开了相应的研究。交直流互联变换器是连接子微网的纽带,Poh Chiang Loh 教授首先提出了基于标幺化的交直流互联变换器自治运行控制策略。该方法对交流子微网频率(交直流互联变换器交流侧频率)和直流子微网电压(交直流互联变换器直流侧电压)进行了标幺化,公式如下:
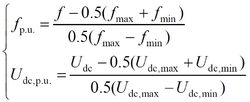
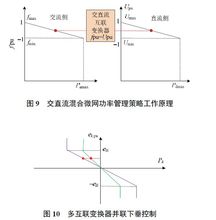 实现标幺化后,交流子微网和直流子微网的不同下垂曲线就可以共用同一坐标系,如图9 所示。为实现各子微网输出功率相同,即fp.u.=Udc,p.u.,该方法将二者差值经过PI控制器,得到互联变换器有功功率的指令。然而多台交直流互联变换器并联时,采用PI控制会得到若干数值解,不一定能按照自身容量实现功率分配。因此,文献利用下垂特性解决上述问题,如图10 所示。图中,纵轴代表频率和电压标幺值的差值ek,p.u.,范围是(-eB,eB),分别对应互联变换器逆变、整流工况的最大功率。对于交直流互联变换器无功功率的管理,同样采用下垂控制,通过测量交流电压幅值Uk 计算出无功功率指令值。与交流子微网下垂控制不同的是,当有功功率从交流子微网流向直流子微网时,交直流互联变换器不提供无功,控制方程表达式为
实现标幺化后,交流子微网和直流子微网的不同下垂曲线就可以共用同一坐标系,如图9 所示。为实现各子微网输出功率相同,即fp.u.=Udc,p.u.,该方法将二者差值经过PI控制器,得到互联变换器有功功率的指令。然而多台交直流互联变换器并联时,采用PI控制会得到若干数值解,不一定能按照自身容量实现功率分配。因此,文献利用下垂特性解决上述问题,如图10 所示。图中,纵轴代表频率和电压标幺值的差值ek,p.u.,范围是(-eB,eB),分别对应互联变换器逆变、整流工况的最大功率。对于交直流互联变换器无功功率的管理,同样采用下垂控制,通过测量交流电压幅值Uk 计算出无功功率指令值。与交流子微网下垂控制不同的是,当有功功率从交流子微网流向直流子微网时,交直流互联变换器不提供无功,控制方程表达式为

其中:带*号表示功率指令值;gk为第k台变换器的有功下垂系数;nk为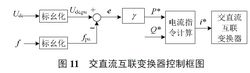 无功下垂系数。控制系统框图如图11 所示。然而,交直流互联变换器始终处于工作状态以确保交流子微网和直流子微网的功率相同,这会造成没必要的功率损耗。为提高系统效率,Poh Chiang Loh又提出一种改进的控制算法。在此改进算法控制下,交直流互联变换器仅工作于有且只有一个子微网过载的情况。1
无功下垂系数。控制系统框图如图11 所示。然而,交直流互联变换器始终处于工作状态以确保交流子微网和直流子微网的功率相同,这会造成没必要的功率损耗。为提高系统效率,Poh Chiang Loh又提出一种改进的控制算法。在此改进算法控制下,交直流互联变换器仅工作于有且只有一个子微网过载的情况。1
展望为适应能源发展计划,下一代电网将呈现分布式电源种类多、分布式负荷类型多以及电力电子变换器数量多等特点。其中,交直流混合微网是未来智能电网的重要组成部分。
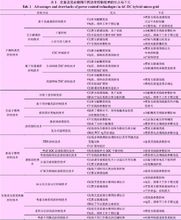 从技术角度介绍了交直流混合微网功率控制的关键技术,同时总结比较了各种控制方法的优点与不足,如表1 所示。表1中的控制方法根据各自特征大致可以分为分散式控制、集中式控制以及分布式控制3类。不难看出,现今还没有一种解决方案可以同时克服所有的不足。分散式控制无需任何互联通信线,变换器仅使用本地信号进行控制,具有扩展性好、可靠性高等优点,但这都是以牺牲电压、频率的控制精度作为代价,并且容易受到线路参数的影响。
从技术角度介绍了交直流混合微网功率控制的关键技术,同时总结比较了各种控制方法的优点与不足,如表1 所示。表1中的控制方法根据各自特征大致可以分为分散式控制、集中式控制以及分布式控制3类。不难看出,现今还没有一种解决方案可以同时克服所有的不足。分散式控制无需任何互联通信线,变换器仅使用本地信号进行控制,具有扩展性好、可靠性高等优点,但这都是以牺牲电压、频率的控制精度作为代价,并且容易受到线路参数的影响。
集中式控制的中央控制器将所有相关信息进行统一处理,因此能够取得精确的控制效果,但是中央控制器一旦出现故障会导致整个系统的瘫痪,另外这种全局网络结构也不利于微网系统的扩展。分布式控制中信息只在变换器单元间传递,避免了中央控制器引起的单点故障,同时也保证了较高的控制精度;特别是采用局部网络的分布式控制,最大限度降低对通信的依赖,满足了微网中分布式电源“即插即用”的要求。可以预见,采用局部网络的分布式控制凭借上述优点会成为未来微网功率控制技术的主要趋势。然而分布式控制技术至今仍受互联通信线以及收敛速度的约束,在交直流混合微网向大规模发展的过程中,还有许多关键技术需要被完善和提出:
1)在采用分布式控制的微网系统中,各智能体仅以优化本地信息作为控制目标,因此多智能体协调运行时,尤其是在通信延迟大、测量有误差等非理想情况下,需要对系统运行的收敛速度以及稳定裕度进行深入分析和准确估定。
2)微网中功率控制技术的工作性能仍然掣肘于通信技术。如何同时实现微网通信系统的低成本和高可靠性是亟待解决的关键技术。同时,融合了电力电子变换技术与通信技术的能源路由器将成为能源互联网中的重要课题。
3)如何研制鲁棒性高、效率高、功率密度高、自治能力强且具备即插即用功能的模块化电力电子设备,是需要学术界和工业界共同研究的微网核心技术。
4)目前,功率控制技术主要还是依据变换器的额定容量进行功率分配。然而在源-网-荷-储都更加复杂的未来微网系统中,进行功率管理时还需要考虑运行成本、效率、寿命、排放惩罚以及奖励政策等众多因素。
5)要实现交直流混合微网大规模接入未来智能电网,其必备条件是制定专用的控制、通信标准。目前IEEE 1547已经为交流子微网系统提供了较为完备的标准框架,但是针对直流系统的标准EmergeAlliance,IEEE DC@Home,Rebus以及IEC SG 至今仍在发展之中,有待进一步完善。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国