

背景
一直以来,采用智能决策支持系统辅助或替代调度员处理电网中发生的故障,快速确定故障设备以提高故障处理的效率,是电网故障诊断研究的方向。
自20 世纪80 年代专家系统开始用于电网故障诊断之后,电网故障诊断的研究逐步深入,发展至今除了方法层面积累了丰富的成果外,还在复杂问题处理、信息融合、规则挖掘、在线电网故障诊断系统的信息获取等诸多方面展开研究,并在实践运行中积累了一定的经验。
当前电网故障诊断的研究成果日趋丰硕,但专门研究地区级电网并不多见。而作为电网基础调管单位的地区级电网,担负着大电网运行的基础职能,其管辖范围从10 kV 至220 kV 甚至更高,电气设备和保护装置相对多样,电网调度对于故障诊断的需求更为强烈。1
地区电网故障时电网结构变化模式相对于正常操作,地区电网发生故障时电气设备失电过程有所不同,在一个短时间间隔内1 台或多台断路器动作导致局部网架结构发生较大变化,并影响到网架上的潮流分布。因此,通过确定断路器分闸导致的电网结构变化模式可以发现电网内故障的发生。
故障时电网结构的异常变化其实是继电保护跳闸逻辑的间接体现,其基本变化模式可以分为以下几类:
 1)模式1,故障电气设备的完全隔离。即设备所连的断路器在故障过程中全部分闸,见图1 模式1 中的T1。这一模式包括以下设备故障形式:主变、电抗器、母线、装设全线速动保护装置的线路、为带有备自投装置的110 kV 终端变电站供电的线路。
1)模式1,故障电气设备的完全隔离。即设备所连的断路器在故障过程中全部分闸,见图1 模式1 中的T1。这一模式包括以下设备故障形式:主变、电抗器、母线、装设全线速动保护装置的线路、为带有备自投装置的110 kV 终端变电站供电的线路。
2)模式2,带有备自投装置的变电站母线故障模式。此时除了原有供电线路已经被完全断开,备用电源线路的电源侧开关也会跳闸,形成多个失电区域,见图1 模式2,当故障设备为B1 或B2 时,会形成L1 以及由L2、B1、B2 和下级变压器构成的2 个失电区域。
3)模式3,220 kV 及以上电压等级母线保护动作模式。此时不仅故障母线所连断路器需要跳闸,而且需要母线所连线路的对侧断路器速动跳闸,形成了多个设备所连的断路器被全部断开的情况,如图1 模式3 中B1 故障所导致的L1 和B1 所连断路器全部分闸。这一模式主要包含非一台半断路器接线的220 kV 及以上电压等级母线故障及其母线保护死区故障。
4)模式4,负荷线路故障模式。在地区级电网调度模型上35 kV 及以下线路以单端元件显示,被定义为负荷。这类单端元件的故障依靠单个断路器的分闸无法直接判定是故障还是正常的倒闸操作,因此必须依赖于潮流分析。
在考虑正常操作前的负荷转移前提下,如果此时由断路器断开的功率大于0.6 倍的正常负荷即判断为故障。正常负荷可以根据本线路的负荷曲线进行计算,如果断路器分闸前本线路所带负荷大小低于其负荷相似日内同时刻负荷大小的0.6 倍,则可认为此时在负荷对侧的用电设备已经进行电源切换等相关操作,断路器跳闸为正常操作。
5)模式5,充电设备故障模式。电气设备充电过程中充电保护动作将导致1 台断路器分闸和1 个电气设备失电,对电网影响最小;但仅凭断路器分闸信息无法区分其与正常倒闸操作的区别,需要依赖充电保护动作信息才能确定这种故障模式。
6)模式6,区域失电模式,被断路器分割的不是单个电气设备,而是一个停电区域。造成这种模式的原因如下:110 kV 母线未采用双母线接线方式时无需装设母线保护,由上级线路近后备保护;电网内110 kV 以下母线无需装设母线保护,故障时依靠变压器后备保护切除;保护或断路器拒动所导致的区域性停电。前2 类是由于保护配置原则所造成,而保护和断路器拒动则是一种复杂故障模式,必须依赖保护信息才能确定。
根据以上电网故障变化模式,利用网络拓扑及结线分析,可以得到断路器分闸引起的电网结构变化模式类型,快速识别出系统中是否发生故障,定位故障区域或初步确定故障设备。
采用基于网架变化模式匹配的方法缺乏对故障过程的分析,不能重构故障过程并判断故障中保护和断路器的动作行为是否正确,无法完全满足电网故障诊断的要求。要实现对于故障过程的分析,还需要对二次系统的动作行为进行详细的分析。1
采用动态故障树的电气二次系统模型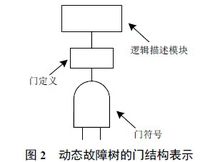 在电网故障时,继电保护的动作逻辑实现由二次回路来完成,只有构建完整的二次系统模型才能对电网故障时继电保护的动作逻辑进行详细的描述。在电网中,二次回路的设计围绕保护装置展开,因此以保护装置为单位构建诊断所需的二次系统模型成为电网故障诊断模型的基础。
在电网故障时,继电保护的动作逻辑实现由二次回路来完成,只有构建完整的二次系统模型才能对电网故障时继电保护的动作逻辑进行详细的描述。在电网中,二次回路的设计围绕保护装置展开,因此以保护装置为单位构建诊断所需的二次系统模型成为电网故障诊断模型的基础。
动态故障树采用门电路描述逻辑模块,其形式如图2 所示。动态故障树常和事件树相结合进行过程分析和故障诊断,适用于时序逻辑关系的表示,其不同于事件树的地方在于分析推理采用反向逻辑推理,并采用归纳的方法确定导致故障发生的所有可能情况。
 采用动态故障树构建电网故障诊断二次系统模型,可以描述保护装置和断路器动作行为的逻辑框架。
采用动态故障树构建电网故障诊断二次系统模型,可以描述保护装置和断路器动作行为的逻辑框架。
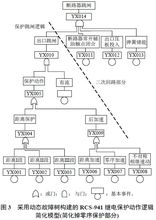
为结合调度端采集的故障信息,故障树中门定义部分修改为调度中心的数据采集点标示,如遥信代码或故障信息代码,用YX0xx 表示,xx 为数字;若没有信息对应则门定义为空,表示这一部分不可观。图3 为采用动态故障树构建的我国110 kV 线路常用的RCS-941 型继电保护装置的动作逻辑模型。
图3 中保护跳闸逻辑部分表示了由装置当前运行定值所确定的保护动作逻辑,二次回路部分描述的主要是断路器控制回路;其中的“有流”是RCS941 保护装置的一个基本判别逻辑,由于没有信息可以反映这一逻辑,属于不可观事件。
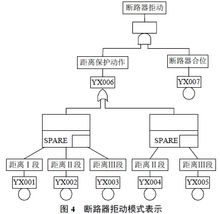 图4 为采用“备用门”所表征的断路器拒动逻辑,备用门同时对距离保护各段的动作进行了顺序约束,用SPARE 来表示;对于每个备用门中关联的逻辑模块,其动作顺序为从左至右,如图4 表示左侧备用门表示当距离I 段的逻辑未能执行时,距离II 段将作为其备用逻辑,距离II 段不能执行时距离III 段为其备用逻辑,它表述的是一种本装置内保护之间的备用逻辑。
图4 为采用“备用门”所表征的断路器拒动逻辑,备用门同时对距离保护各段的动作进行了顺序约束,用SPARE 来表示;对于每个备用门中关联的逻辑模块,其动作顺序为从左至右,如图4 表示左侧备用门表示当距离I 段的逻辑未能执行时,距离II 段将作为其备用逻辑,距离II 段不能执行时距离III 段为其备用逻辑,它表述的是一种本装置内保护之间的备用逻辑。
采用动态故障树搭建二次系统模型为分析电网故障时继电保护的基本动作模式提供了基础。故障诊断时可以通过遍历不同装置动态故障树来生成保护动作的基本模式,并据此完成电网诊断。1
继电保护的动作模式电网故障诊断问题求解的一般条件1)电网内的每一套继电保护装置的正常动作顺序都由整定值限定,装置间的动作顺序则由其对应一次设备的拓扑关系所限定,故障过程中的保护和断路器动作行为属于强约束限定,形成分析的基本模式。
2)当电网故障时,继电保护和断路器是为应对故障而配置的顺序控制元件,顺序由整定计算原则所限定,因此由保护和断路器动作所构成的故障事件是可以逐步分析的。如果故障事件中存在保护或断路器不满足预选设定的顺序,则认为其动作错误。
3)由于电网故障区域内配置的保护数量有限,同时每套保护装置内配置的保护类型也有限,因此由整定原则所约束的不同继电保护动作配合所构成的事件序列组合是一个有限的集合。
4)故障事件中可能存在因保护拒动等不确定因素造成的持续过程较长的故障,但由于继电保护装置之间的相互独立性以及各厂站二次系统工作不相关,故障终将被切除,因此故障事件有时限约束,即由保护和断路器构建的事件序列是有限事件序列。
5)在同一故障事件中,保护动作的目的是通过断路器动作将故障切除,若同一个保护重复动作则意味着故障事件中存在异常动作行为,如:断路器重合于故障线路后加速未动作而导致的重合复掉。
以上的限定表明采用继电保护信息和断路器动作信息分析故障过程的本质是校验人工预先设定的固定顺序控制逻辑在故障过程中是否正确执行,是故障时可观故障信息和预设控制逻辑顺序的匹配分析。
假设在某一故障情况下,故障区域相关电气设备所对应的继电保护及断路器全部可能动作的行为(包含错误动作)将构成一个有序事件序列,用F{F1,F2, ..., Fi, ..., Fn}表示,Fi 表示为应对某一设备故障而预先设定的保护及断路器动作逻辑。
这一序列基于保护配置原则并由整定原则所约束;此时调度端所接受到的继电保护和断路器的实际动作行为事件序列以S{s1, s2,... , sj, ... , sm}表示,sj 表示单条保护或断路器动作信息;则F中必然存在一个Fk=S。为了构建集合F,需对故障时继电保护装置的基本动作模式进行分析。1
继电保护装置动作模式划分继电保护的配置及整定是面向元件,因此对于安装在各变电站内的继电保护装置,只能区分区内和区外故障。区内即其所配属的电气设备,区外即为除去配属设备的外部设备。所以其动作模式可以划分为保护配属对象故障模式和外部设备故障模式。再考虑断路器和保护装置自身异常动作的可能性,将保护装置的动作模式划分如下5 种。
1)保护配属对象故障模式。
由于单套装置内配置有多种类型的保护,这一模式不唯一,由一个保护动作事件序列集合构成,断路器动作信息是保护动作的结果。定义集合FI{Fi1, Fi2,... ,Fin}为一个保护和断路器动作序列,以图3 中的RCS-941 装置为例,则动作序列为:
 Fi1{距离I 段,断路器跳闸};
Fi1{距离I 段,断路器跳闸};
Fi2{距离I 段· 零序I 段,断路器跳闸};
Fi3{距离II 段,断路器跳闸};
Fi4{距离II 段· 零序II 段,断路器跳闸}。
其中“·”表示并行事件,“,”表示顺序关系。
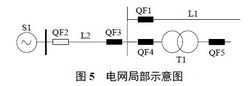
图5 描述了一个典型的地区局部电网110kV 终端线路的接线,接线方式简单。其中包括等值系统S1,变压器T1,线路L1、L2,断路器QF1, …, QF5。
由于变电站中母线接线常采用桥形接线或单母线分段接线,因此不配置母差保护和断路器失灵保护,这就导致当110 kV 线路故障时,如果发生断路器拒动,故障需要由上一级线路后备保护进行切除。
图5 中的线路L2 发生故障,若采集的故障信息形成动作序列S{L2 距离I 段保护动作,QF2 断路器跳闸},和事先设定的Fi1 匹配,由此可以判断出故障设备为L2。
2)外部设备故障模式。
这一模式下,保护装置动作指向外部系统,同样这一模式也不唯一。定义集合FO{Fo1, Fo2,... ,Fon}
为外部设备故障时一个保护和断路器的动作序列,以图3 中的RCS-941 装置为例:
Fo1{距离II 段,断路器跳闸};
Fo2{距离II 段· 零序II 段,断路器跳闸};
Fo3{距离III 段,断路器跳闸};
Fo4{距离III 段· 零序III 段,断路器跳闸};
Fo5{零序IV 段,断路器跳闸}。
当保护装置的动作模式确定为外部设备故障模式时,依据本装置的动作信息无法判定故障设备,需要结合其他装置的动作信息加以判定;同时需结合结线分析对不同保护装置对应的电气设备之间的连接关系进行分析,以确定保护之间的配合关系。1
3)断路器拒动模式。
这个模式中,保护装置动作的保护指向某设备,当该设备的故障信息中保护动作信息可以匹配于保护配属对象故障模式或外部设备故障模式的保护信息,但故障事件序列中未有该设备的断路器动作信息时,可以认为发生了断路器拒动。
定义集合BR{BR1, BR2,... , BRn}为断路器拒动时保护的动作序列,以图4 中的RCS-941 装置为例:
BR1{距离I 段保护,距离II 段保护,距离III段保护};
BR2{距离II 段保护,距离III 段保护};
BR3{距离I 段保护,距离II 段保护};
BR4{距离I 段保护};
BR5{距离II 段保护}。
4)保护拒动模式。
保护拒动是一个不可观事件,只能进行近似估计,即由可疑故障设备上级动作保护的外部动作模式来确定。
定义集合PR 为保护拒动时保护和断路器的动作序列,集合内元素为其上级保护的外部系统故障模式,如图5 中调度端接收事件系列为S{L2 距离III 段保护动作,断路器QF2 跳闸}时,可以确定其下级L1 或变压器T1 保护拒动。
5)异常动作模式。
这一模式主要指保护动作中存在有不满足保护动作时限约束、故障类型约束的情况,主要用于辨识继电保护的错误动作行为。
定义集合M 为异常动作时保护和断路器的动作序列,以图4 中的RCS-941 装置为例:
M1{距离I 段, 距离II 段};
M2{相间距离I 段,零序I 段};…。
断路器拒动模式和保护异常动作模式可以重叠。
上述5 种模式对应于单套保护装置或断路器,在故障时由于可能在区域内动作多套保护装置,需要将多套装置的动作模式进行处理,以生成可以匹配故障信息的事件序列。1
多重化保护配置下的保护动作模式叠加由于220 kV 及以上继电保护装置双重化配置,变压器保护的配置多重化,这些保护动作的模式需要按照其动作时限进行序列重排,将独立工作的保护装置的动作模式进行重叠,以反映故障时的多个保护装置同时动作的情况。
如对于某220 kV 线路保护,由于其配置有RCS-931A 型保护及PSL602G 型保护,其基本动作模式之一为: Fi1{RCS-931A 差动保护动作·RCS-931A 距离保护I 段动作· PSL602G 纵联距离动作· PSL602G 距离保护I 段动作}。1
失电区域多装置动作模式的网络拓扑叠加在断路器或保护拒动时,事故范围扩大,故障分析将涉及到多个电气设备所配置的继电保护装置,此时依靠单套装置的动作模式无法完成对电网故障的过程分析。
为完成和调度端所收到的故障信息的顺序事件匹配,不同保护装置的动作模式需要基于整定原则根据其对应电气设备的拓扑关系进行叠加。拓扑叠加时,首先通过结线分析程序,将2 个电气设备之间距离电源较远的电气设备设定为下级设备;然后依据保护动作级差时限对2 个电气设备的保护动作模式进行序列重排:即下级设备的保护被假定为故障设备,采用保护配属对象故障模式或断路器拒动模式,上级设备的保护动作模式为外部设备故障模式,形成新的事件序列,将之与故障信息进行匹配。
图5 所示电网中的调度端收到故障信息,构成事件序列S{L1 线距离保护I 段动作· 零序保护I段动作,L1 线距离保护II 段动作· 零序保护II 段动作,L2 线距离保护II 段动作· 零序保护II 段动作,断路器QF2 动作},此时,L1 和L2 的继电保护动作模式进行叠加,以匹配于S。通过结线分析可以得到:L2 距离等值电源S1 更近,而L1 通过母线和L2 相连接,其下级设备中没有连接电源设备,因此L2 为L1 的上级设备,两者之间存在保护配合关系,可以进行保护模式的叠加。L1 未有断路器动作信息,符合断路器拒动模式和异常动作模式;而L2 符合外部设备故障模式中的Fo2 序列,因此可确定L1 线故障,断路器拒动,L2 线延时切除故障。1
继电保护动作的模式不相容现象采用保护信息进行故障诊断是一种间接形式的事件分析,并未能直接观察到故障,而是由保护装置的动作行为来确定故障,即假设某一保护动作和断路器动作事件的发生是由对应的电气设备故障导致的。
这就带来一个问题,因为继电保护装置存在错误动作的可能。若在某故障事件中有2 个电气设备的主保护同时动作,则2 个保护装置的动作模式出现了不相容现象,此时确定2 个设备同时发生故障还是其中有一个保护装置错误动作,就成为值得探讨的问题。
如图5 所示电网中的调度端接收到故障信息,构成事件序列S{L1 线距离保护I 段动作· 零序保护I 段动作,L2 线距离保护I 段动作、零序保护I段动作,断路器QF2 动作}。
进行模式匹配将得出:L2 线保护对象配属故障模式,L1 线为断路器拒动模式,仅仅采用单装置模式及拓扑叠加将不能形成完整的逻辑链,而依赖于保护和断路器动作信息将无法得出确定性的结论,无法确定此时是L1 故障、断路器拒动,还是L2 主保护错误动作。1
这就需要有新的假设条件进行约束,考虑到电气设备故障时,在故障路径中受持续短路电流作用的非故障设备可能出现绝缘破坏的概率远远大于故障时非故障设备保护装置误动作的概率,可以在出现保护动作模式不相容的情况时进一步分析故障路径。当动作保护所配属的不同电气设备存在于同一故障路径中时,可以认为是2 个设备先后发生了故障,通过结线分析进行判断,距离电源较远的电气设备为最早发生故障的电气设备。
如上例,通过结线分析得到L2 和L1 拓扑相连并且L2 距离故障后的带电设备更近。则可以确定故障由L1 开始,由于断路器拒动故障未及时切除导致L2 故障。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国