

简介
传统的PID控制是误差的比例、积分、微分三项的线性组合,它具有原理简单、参数易于调整、鲁棒性较强等特点,在工业过程控制中得到了广泛的应用。但是对于一些复杂的系统,特别是非线性对象,PID控制器并不能得到满意的效果。如果对传统的PID加以改进,使其能对一些非线性对象实现较高的控制要求,将有很大的实际意义。非线性PID是在传统PID的基础上引进非线性因素来加以改进的,控制量的基本要素不是直接取自输入-输出的误差,而是经过非线性变化后的误差的比例、积分和微分。由于非线性PID控制器中的增益参数能够随控制误差而变化,从而克服和减弱了非线性因素的影响,提高了控制器的鲁棒性和适应性1。
结构原理图图1是非线性PID控制器的结构原理图。图中,r(t) 为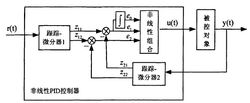 参考输入信号,u(t)、y(t)分别是受控系统的输入和输出信号:非线性跟踪-微分器1、2的输出信号中
参考输入信号,u(t)、y(t)分别是受控系统的输入和输出信号:非线性跟踪-微分器1、2的输出信号中 、
、 分别跟踪 r(t) 和y(t),
分别跟踪 r(t) 和y(t), 、
、 分别为 r(t)和 y(t) 的微分信号;
分别为 r(t)和 y(t) 的微分信号; 、
、 、
、 是跟踪-微分器输出的参考输入和系统输出之间的偏差及其积分和微分变量1。
是跟踪-微分器输出的参考输入和系统输出之间的偏差及其积分和微分变量1。
非线性PID控制模型非线性PID控制器可表示为:
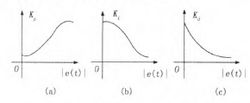

式中,Kp(e(t))、Ki(e(t))、Kd(e(t))分别为比例、积分和微分系数,它们都是误差的非线性函数。根据经典控制原理,系统阶跃响应过程中控制器P / I / D各部分的控制作用,相应的增益参数的理想变化如图2所示。
比例控制KpKp加快响应速度,减少过渡过程时间。为保证系统有足够的响应速度,Kp的大小应与误差的绝对值成正比,且当e(t)=0时,应保证Kp为合理的非零值,由此取比例系数的调节律为:

积分控制KiKi减少系统的稳态误差。当e(t)大时,Ki较大;当e(t)小时,Ki较小。所以积分系数的调节律为:

微分控制KdKd增大系统阻尼,降低过渡过程时间。在不影响速度的前提下,Kd应随e(t)逐渐增大,但同时应限制Kd以抑制超调。由此微分系数的调节律为:

上述3式中, ,
, ,
, 都为正实数。通过调整
都为正实数。通过调整 、
、 、
、 的大小分别调整Kp、Kd、Ki的变化速率。按上述PID控制器参数在系统动态过程中的调节规律,即各参数与误差e(t)之间的非线性函数关系,分别调节控制器各部分的控制作用2。
的大小分别调整Kp、Kd、Ki的变化速率。按上述PID控制器参数在系统动态过程中的调节规律,即各参数与误差e(t)之间的非线性函数关系,分别调节控制器各部分的控制作用2。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国