

概述
在微分(D:differential)控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系,微分的作用足能够超前调节。
自动控制系统在克服误羞的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。
这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仪足放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样具有“比例+微分”的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例微分(PD)控制。即“比例(P)+微分(D)”控制器能改善系统在调节过程中的动态特性。2
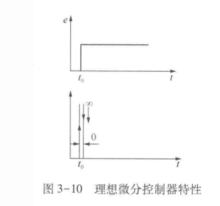
比例微分控制规律对于惯性较大的对象,为了使控制及时,常常希望能根据被控变量变化的快慢来控制。在人工控制时,虽然偏差可能还小,但看到参数变化很快,估计很快就会有更大偏差,此时操作人员会过分地改变阀门开度以克服干扰的影响,这就是按偏差变化速度进行控制。在自动控制中,这就要求控制器具有微分控制规律,就是控制器的输出信号与偏差信号的变化速度成正比,即

式中 ——微分时间常数;
——微分时间常数;
式中 ——偏差信号变化速度。
——偏差信号变化速度。
此式表示理想微分控制器的特性.若在 时输入一个阶跃信号,则在 时刻控制器输出将为无穷大,其余时间输出为零。这种控制器用在系统中,即使偏差很小,只要出现变化趋势,马上就进行控制,故有提前控制之称,这是它的优点。但它的输出不能反映偏差的大小,假如偏差固定,即使数值很大,微分作用也没有输出,因而控制结果不能消除余差,所以不能单独使用这种控制器,它常与比例或比例积分组合构成比例微分(PD)或比例微分积分(PID)控制器。3
时输入一个阶跃信号,则在 时刻控制器输出将为无穷大,其余时间输出为零。这种控制器用在系统中,即使偏差很小,只要出现变化趋势,马上就进行控制,故有提前控制之称,这是它的优点。但它的输出不能反映偏差的大小,假如偏差固定,即使数值很大,微分作用也没有输出,因而控制结果不能消除余差,所以不能单独使用这种控制器,它常与比例或比例积分组合构成比例微分(PD)或比例微分积分(PID)控制器。3
比例微分控制规律为:
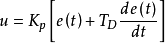
微分作用按偏差的变化速度进行控制,其作用比比例作用快,因而对惯性大的对象用比例微分控制规律可以改善控制质量,减小最大偏差,节省控制时间。微分作用力图阻止被控变量的变化,有抑制振荡的效果,但如果加得过大,由于控制过强,反而会引起被控变量大幅度的振荡。微分作用的强弱由微分时间常数来决定, 越大,微分作用越强, 越小,微分作用越弱。3
越大,微分作用越强, 越小,微分作用越弱。3
比例微分控制的特点相对比例控制作用而言,微分控制有超前作用,即当e作阶跃变化时,输出会出现跳跃,加大了几倍调节作用。因此,要想得到与比例作用同样的调节效果,采用比例微分控制,就可缩短所需时间。微分作用与偏差变化率成比例,即它是根据偏差变化趋势产生控制作用,因而有“预先控制”的性质。俗称超前调节。微分作用的超前特性,只对广义对象的容量滞后有效。而对很大的纯滞后无效。
引入过强的微分作用也会降低系统稳定程度,增加振荡趋向,所以 应选用合理。1
比例微分控制的适用场合从实际使用情况看,单纯的比例微分控制用得较少,在生产上用得较多的是比例、积分和微分三种规律结合起来的PID控制。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国