

简介
多自由度电动机具有机械集成度高、电机结构材料和驱动控制系统元件利用率高等特点,可以大大简化机械系统的结构,减小体积和重量,从而可以提高系统的精度和动态性能,提高性能价格比,因此在机器人等具有多个运动自由度的系统中具有广泛的应用前景1。
90年代以来,美国、欧洲、日本等国的学者对多自由度电动机的研究工作十分活跃,各种工作原理和不同结构的样机层出不穷,比较典型的有法国的A. Foggia等人研制的外转子两自由度球形感应电动机、美国G . J . V achtsevanos等人研制的三自由度球形感应电动机、美国Kok-Meng Lee等人研制的球形步进电动机、A. R. Miles等人研制的三相自整角原理的两自由度球形电动机、日本的K. Kaneko等人研制了的三自由度球形直流伺服电动机、日本TOYAMA Shigeki等人研制的两自由度球形超声波电动机等等。
我国在多自由度电动机方面的研究起步较晚,主要研究成果有西北工业大学的三自由度永磁直流伺服电动机、华中理工大学的三自由度球形交流伺服电动机、浙江大学的组合式两自由度步进电动机。
从现有资料看,国内外学者所研制的多自由度电动机大都采用球形结构,从结构原理上看球形结构较为合理,易于实现多自由度旋转运动,但也存在着如结构复杂、加工困难、电磁藕合关系复杂、不易控制等缺点。为此,哈尔滨工业大学在传统旋转电机原理和制造工艺基础上提出了非球形的正交圆柱结构多自由度电动机方案,并在国家863计划的支持下研制出了正交圆柱结构多两自由度和三巨由度电动机的样机,实验研究证明了该结构的可行性。
电机的结构和工作原理性构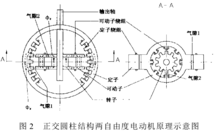 图2别是正交圆柱结构两囱由度电司机的结构分解图和原理示意图。从电机的结构分解图(见图1)可以看出,该电机由定子、可动子转子、一对X向轴承、一对可动端盖、一对Z位轴承、一对Z向端盖组成1。
图2别是正交圆柱结构两囱由度电司机的结构分解图和原理示意图。从电机的结构分解图(见图1)可以看出,该电机由定子、可动子转子、一对X向轴承、一对可动端盖、一对Z位轴承、一对Z向端盖组成1。
电机的定子由硅钢片叠压制成,内侧圆周上续匀布置一些齿和槽,槽内设置两相定子励磁绕组电机的转子由输出轴和两段铁心组成,两段铁心士分别均匀布置若干小齿,两段铁心相互错开1/2迭距。电机的可动子由永磁体及其两侧的两段铁心红成,永磁体采用高矫顽力、高磁能积、易于加工铁硼材料,Z向轴向充磁。由于永磁体的作用可动子外侧4个齿呈N, S, S, N规律分布。可司子内侧沿圆周分布4对极,每个极上有若干小齿极间槽内设置两相励磁绕组。转子铁心和可动子锣心与定子铁心一样均由硅钢片叠压制成。
可动子外部齿端部及内部齿端部分别加工成协X轴和Z轴为轴线的两个相互正交的圆柱面,分另i与定子和转子齿表面形成同心圆柱,从而在定子迭与可动子外部齿之间形成气隙1,在可动子内部迭与转子齿之间形成气隙2,可动子通过螺钉与可司端盖固联在一起,可动端盖又通过X向轴承安翠在定子上,从而可动子与可动端盖构成的整体可札对于定子绕X轴作有限转动。电机转子通过Z向轴承和Z向端盖与可动子安装在一起后,可相对于可动子绕Z轴连续转动。
当定子的两相绕组按A-B- ( A )- (-B)的顺序通电时,小、经永磁体、可动子铁心、气隙1、定子铁心、气隙1、另一段可动子铁心回到永磁体形成闭合回路,电机工作于PM(永磁)电动机状态,电机的转子随可动子相对于定子绕X轴转动即偏转。当可动子的两相绕组按A-B- ( A )- (-B)的顺序通电时,小z经永磁体、可动子铁心、气隙2、两段转子铁心、气隙2,另一段可动子铁心回到永磁体,形成闭合回路,电机工作于HB(混合式)步进电动机状态,电机的转子相对于可动子绕z轴连续转动即自转。在电机的定子绕组与可动子的绕组同时按自己的方式通电时,电机的输出轴同时进行自转和偏转,从而实现两自由度运动。
如果改变电机的支撑结构并在适当的部件上设置输出轴,可使该电机实现两个偏转自由度,从而实现水平侧摆和竖直俯仰的两自由度运动。
电机的性能参数及特点(1)输出轴偏转范围较大1。
(2)力能指标较高,定子绕组电流为1A时,输出轴的最大偏转静转矩可达30Nm;可动子绕组电流为1A时,输出轴的最大自转静转矩可达4 0Nm。
(3)采用非球形结构,结构简单,制造容易。
(4)两个气隙共用一个永磁体,一个永磁体、两组绕组,就实现了两个转动自由度,因而体积较小,陛能体积比较高。
(5)采用高性能专用的PWM芯片来实现细分驱动,因而具有较高的定位精度和速度控制精度。
总结非球形正交圆柱结构两自由度电动机具有机械系统结构紧凑简单、集成度高、容易加工制造、电机体积较小、驱动控制系统元件利用率高、易于控制等性能特点,在具有多个运动自由度的机械系统中,一台电机可以代替两台单自由度电动机1,并可提高系统的精度和动态性能,在机器人、多坐标机械加工中心、航天飞行器、电动陀螺仪、全方位跟踪天线、炮塔转台、船舶推进系统、人体假肢、医疗器械、全景摄像操作台、球形阀等设备中具有广泛的应用前景。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国