

概述
目标识别最早是通过接收可听信号来完成,经训练的操作者将根据雷达照射目标所产生的声音而分类目标。虽然训练有素的操作员很成功,但自动化的方法也已开发,并继续向更高的分类精度和速度发展。
自动目标识别可用于识别人造物体,例如地面、飞行器以及生物目标(例如动物、人类和植物杂波)。这对于识别和滤除战场上的大群鸟类在多普勒天气雷达上引起的干扰等是有用的。
军事应用则包括简单的识别系统,例如IFF转发器,以及无人航空载具和巡航导弹等其他应用。在民用领域使用自动目标识别也有着越来越多的尝试。例如使用自动目标识别确保边界安全,使用安全系统识别地铁轨道等上的物体或人体等1。
历史目标识别自有雷达以来就已存在。雷达操作员通过接收到的反射信号产生的音频识别敌方的轰炸机和战斗机。
向操作员播放基带信号来完成目标识别已存在多年。通过收听信号,经过训练的雷达操作员可以识别被照射目标的各种信息,诸如载具的类型、目标的大小,乃至潜在区分生物目标。但这种方法也有许多限制,操作员必须被训练每个目标的特征,如果目标以高速行进则可能无法听到,并且人类决策可能增加错误判断的概率。但可听信号表示为自动归类目标提供了基础。已经开发的数种方法已使用在其他领域(例如语音识别)。
相关概念微多普勒效应雷达通过定时发射信号并根据该信号所照射目标的反射所花费的时间确定与物体的距离。在该物体非静止时,它引起多普勒效应的频率偏移。除了整个物体的平移运动外,物体的振动或旋转也引起频率的额外偏移。当这种情况发生时,多普勒频移信号将被调制。这种引起信号调制的额外多普勒效应称为微多普勒效应。这种调制可以具有特定模式或特征,从而能为自动目标识别开发算法。微多普勒效应将随时间推移而改变,这取决于目标的运动、引发时间和频率变化的信号。
时频分析该信号的傅立叶变换分析是不够的,因为傅里叶变换不能解释时变分量。获取频率和时间函数的最简单方法是使用短时距傅立叶变换(STFT)。但是,诸如加伯转换和维格纳准概率分布(WVD)等更鲁棒的方法可以用于提供频率和时域的同时表示。然而,所有这些方法都要折衷考虑频率分辨率与时间分辨率。
检测一旦已获取光谱信息,它可以与包含系统将识别目标的有关信息的现有数据库进行比较,并且据此做出有关被照射目标为何的决定。这通过对接收到的信号建模,然后使用统计估计方法确定库中的哪个目标最适合使用接收到的信号构建的模型来完成决定,统计估计诸如最大似然估计(ML)、多数决原则(MV)和最大后验概率(MAP)。
方法提取特征在语音识别中使用音频特征、基于音频启发系数构建自动识别目标的系统已被完成。这些系数包括:
线性预测编码(Linear predictive coding,LPC)系数;
倒频谱(Cepstral linear predictive coding,LPCC)系数;
梅尔倒频谱(Mel-frequency cepstral coefficients,MFCC)。
处理基带信号可以获取这些系数,然后用统计处理方法决定数据库中的哪个目标与所获取的系数最相近。使用哪些特征和决策方案取决于系统和应用。
用于分类目标的特征不限于语音启发的系数。可以使用广泛的特征和检测算法来完成自动目标识别。
检测算法为完成自动化检测的目标,需要创建一个训练数据库。这通常使用在目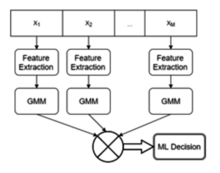 标已知时收集的实验数据完成,然后存储供ATR算法使用。
标已知时收集的实验数据完成,然后存储供ATR算法使用。
流程图展示了检测算法的示例。该方法使用M个数据块,从每个(即LPC系数,MFCC)提取期望的特征,然后使用高斯混合模型(GMM)对它们建模。在使用收集的数据获得模型之后,针对包含在训练数据库中的每个目标形成条件概率。在该示例中,存在M个数据块。这将导致数据库中每个目标的M个概率的集合。这些概率用于使用一个最大似然估计确定目标2。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国