

简介
机器人在生产自动化中占有极其重要的位置,目前工业机器人己广泛的应用在生产自动化中,而绝大多数的工业机器人是按预先编制好的程序来进行工作,这称之为位置控制。但当外界条件发生变化时,工作状态就要发生变化,为了使机器人做正确的动作,则机器人就应使其动作响应外界条件的变化作相应的调整,如果此时采用位置控制机器人,工作将产生困难。
要使机器人能对外界的变化产生响应,一般采用视觉传感器、力传感器等来感受外界的变化,然后将信息反馈给控制系统,使之根据外界的变化来控制机器人的动作。柔顺控制就是从力传感器取得控制信号,用此信号去控制机器人,使之响应这个变化而动作。人们在进行装配或加工时,是通过被装配物(加工物)反馈回来的信息进行调整,边调整边工作,如果机器人也具有这种能力的话,就可实现可靠而准确的工作了,因此在机器人上装上力传感器采用柔顺控制(Compliance Control)就可实现。将柔顺控制应用于机器人控制系统使得机器人向智能化方向迈了一步。关于机器人的柔顺控制问题,国内外机器人专家进行了大量的研究,称之为柔顺控制研究。
柔顺性分为主动柔顺性和被动柔顺性两类。机器人凭借一些辅助的柔顺机构,使其在与环境接触时能够对外部作用力产生自然顺从,称为被动柔顺性;机器人利用力的反馈信息采用一定的控制策略去主动控制作用力,称为主动柔顺性。
被动柔顺机构简介所谓被动柔顺机构,即利用一些可以使机器人在与环境作用时能够吸收或储存能量的机械器件如弹簧、阻尼等,而构成的机构一种典型的最早的被动柔顺装置RCC是由MITDraper实验室设计的,它用于机器人装配作业时,能对任意柔顺中心进行顺从运动。RCC实为一个由6只弹簧构成的能顺从空间6个自由度的柔顺手腕,轻便灵巧。用RCC进行机器人装配的实验结果为:将直径4Clnm的圆柱销在倒角范围内且初时错位2mm的情况下,于0. 25s内插入配合间隙为0.01mm的孔中。
缺点机器人采用被动柔顺装置进行作业,显然存在一定的问题:
1)无法根除机器人高刚度与高柔顺性之间的矛盾;
2)被动柔顺装置的专用性强,适应能力差,使用范围受到限制;
3)机器人加上被动柔顺装置,其本身并不具备控制能力,给机器人控制带来了极大的困难,尤其在既需要控制作用力又需要严格控制定位的场合中,更为突出。
4)无法使机器人本身产生对力的反应动作,成功率较低等等。
也正是这些被动柔顺方法的不足之处,决定了机器人专家们探索新的研究方法。因此,为克服被动柔顺性存在的极大不足,主动柔顺控制应需而生,进而成为、乃至今日仍为机器人研究的一个主要方向。
主动柔顺控制概述主动柔顺控制也就是力控制.随着机器人在各个领域应用的日益广泛,许多场合要求机器人具有接触力的感知和控制能力,例如在机器人的精密装配、修刮或磨削工件表面抛光和擦洗等操作过程中,要求保持其端部执行器与环境接触。所以机器人完成这些作业任务,必须具备这种基于力反馈的柔顺控制的能力。
自第一台机器人问世以来,研制出刚柔相济、灵活自如的机器人,一直为数代机器人专家努力的目标,而主动柔顺控制正是实现这一目标的重要环节,因此力控制成为国际前沿研究的热点。大家围绕控制策略、控制理论和控制方法等一系列问题,开展了颇有成效的研究工作。
最早的主动柔顺控制研究可以追溯到50年代,当时Goertzs针对放射性实验工场的恶劣环境,在电液式主从机械臂上装上力反馈装置,当操作者在主操作机上操作时,就可以感受到从操作机与环境的接触作用力,实质也就是力遥感。
60年代,Mann主持研制了具有力反馈能力的人造肘。关节电机由“肌肉”电极信号和关节应变仪信号驱动,这样电流将发挥肌肉作用效果。但由于当时控制条件的限制,控制系统实时性差,系统不易稳定。
自70年代,随着计算机机器人传感器和控制技术的飞速发展,机器人的力控制发生了根本变化,发展成为机器人研究的一个主要方向:机器人主动柔顺控制。
机器人主动柔顺控制是新兴智能制造中的一项关键技术,也是柔性装配自动化中的难点和“瓶颈”,它集传感器计算机、机械、电子、力学和自动控制等众多学科于一身,其理论研究和技术实现都面临着不少急待解决的难题.研究成果不仅在理论上具有重要意义,而且在技术上也可以实现曲面跟踪、牵引运动和精密装配等依从运动控制。机器人主动柔顺控制的实现克服了被动柔顺控制的不足,因此,机器人的主动柔顺控制研究成果具有十分广阔的应用前景。
主动柔顺控制策略设计机器人力控制结构,处理力和位置控制二者之间的关系,也就是机器人柔顺控制之策略,为主动柔顺控制研究中的首要问题.有关力控制的研究首先集中于此,都是从不同的角度对控制策略进行阐述,虽然观点各异,但从机器人实现依从运动的特点来看,一般可归结为4大类:阻抗控制策略、力/位混合控制策略、自适应控制策略和智能控制策略。
阻抗控制其特点是不直接控制机器人与环境的作用力,而是根据机器人端部的位置(或速度)和端部作用力之间的关系,通过调整反馈位置误差、速度误差或刚度来达到控制力的目的,此时接触过程的弹性变形尤为重要,因此也有人狭义地称为柔顺性控制。此中以Whitney, Salisbury, Hogan,Kazarooni等人的工作具有代表性。并且Maples和Becker进行了总结:这类力控制不外乎基于位置和速度的两种基本形式。当把力反馈信号转换为位置调整量时,这种力控制称为刚度控制当把力反馈信号转换为速度修正量时,这种力控制称为阻尼控制当把力反馈信号同时转换为位置和速度的修正量时,即为阻抗控制。阻抗控制结构,其核心为力运动转换矩阵K设计,运动修正矩阵似WX=K F,从力控角度,希望K阵中元素越大越好,则系统柔一些;从位控来看,希望K中元素越小越好,则系统刚一些。从而也体现了机器人刚柔相济要求的矛盾,这也给机器人力控制带来了极大的困难。
力/位混合控制从具有代表性的Mason, Paul和Mills等人的研究可以看出力/位混合控制的提出有一个过程。
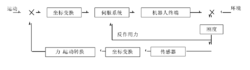
机器人力控制的最佳方案:以独立的形式同时控制力和位置,理论上机器人力自由空间和位置自由空间是两个互补正交子空间,在力自由空间进行力控制,而在剩余的正交方向上进行位置控制。此时的约束环境被当作不变形的几何问题考虑,也有人狭义地称为约束运动控制。
Mason于1979年最早提出同时非矛盾地控制力和位置的概念和关节柔顺的思想,他的方法是对机器人的不同关节根据具体任务要求分别独立地进行力控制和位置控制,明显有一定局限性。1981年Raibert和Craig在Mason的基础上提出了力/位混合控制,即通过雅可比矩阵将作业空间任意方向的力和位置分配到各个关节控制器上,可这种方法计算复杂。为此H. Zhang等人提出了把操作空间的位置环用等效的关节位置环代替的改进方法。但必须根据精确的环境约束方程来实时确定雅可比矩阵并计算其坐标系,要实时地用反映任务要求的选择矩阵来决定力和位控方向。总之,力/位混合控制理论明确但付诸实施难。下图为力/位混合控制结构。

自适应控制策略力控制目的是为了有效控制力和位置。但机器人为多自由度、时变和强耦合的复杂体,系统本身的位姿随时而变,加上外部环境存在极大的模糊性,有时无法确定。上述两种策略广义上属于经典控制的范畴,为力控制研究发展打下了坚实的基础,但从适用范围和控制效果看仍有不足,更无法使其推广应用。机器人本身的多自由度和位姿的不确定性,力和位置强耦合的力控制特点,以及阻抗控制和力/位混合控制策略的局限性,决定了众多学者进行自适应研究尝试的必然性。具有代表性的是:Chung Jack G H , Leininger Gay G 直接在多任务坐标系统中,用学习进行重力、动摩擦力和柔顺反作用力补偿,以插孔为目标,进行自适应实验;KucTae-Yong, Lee Jin S , Park ByungHyun采用自适应学习的混合控制方法,进行了约束运动控制尝试,在逆动力学求解、收敛性及抗干扰方面获得满意的效果。NicolettiGuy M 用Lyapunov稳定理论,针对约束运动,对模型参考自适应PID控制的稳定性条件和判据进行了研究。另外,针对机器人力控制特点众多学者进行了变结构力控制尝试.从现有的成果来看,自适应控制和变结构控制大部分处于理论研究和仿真实现的水平,并没有取得突破。
智能控制新策略上述3种控制策略,存在一个共同的建模难题.就机器人本身来讲,时变、强耦合以及不确定性给机器人控制带来了困难.再加上力反馈的输入,更增加了建模的难度.从现有的研究成果来看,上述3种策略各有优缺点但大多处于理论探索和仿真阶段,无法寻找彻底解决机器人力控制问题。另外机器人研究已进入智能化阶段,决定了机器人智能力控制策略出现的必然性。具有代表性的研究:Connolly Thomash.等将多层前向神经网络用于力拉混合控制,根据检测到的力和位置由神经网络计算选择矩阵和人为约束,并进行了插孔实验;日本的福田敏男等用4层前馈神经网络构造了神经伺服控制器,进行了细针刺纸实验,能将力控制到不穿破纸的极小范围。此后不久,又将之用于碰撞试验,取得了一定的成果,但机构简单,针对性强,尚缺少普遍性;Xu Yangsheng等提出了主动柔顺和被动柔顺相结合的观点,研制了相应的机械腕,采用模糊控制的方法,实施插孔。从研究成果来看,智能控制仍处于起步阶段,尚未形成独立的控制策略,仅仅将智能控制原理如模糊和神经网络理论对以往研究中无法解决的难题进行新的尝试,仍具有一定的局限性。
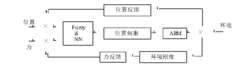
从机器人力控制的特点来看,它是在模拟人的力感知的基础上进行的控制,因而智能控制具有很强的研究价值。有人详细分析了各种各样的研究方法,提出了基于模糊神经网络的智能“力/位并环”的控制策略。
智能力拉并环控制结构的基本原理如图所示。将力控制大系统分解成子系统,将力拉并行输入,利用模糊神经网络进行综合,输出为位置量。这样,并不改动机器人的位置伺服系统,可以充分利用原机器人的优良位置控制性能。另外还有其他特点:
1)它既具有阻抗控制的优点又具有力/位混合控制的特点;
2)具有联想记忆的功能,容错、纠错、自学习和自组织为此一大特色。尤其,该策略的学习功能明显优于自适应学习;
3)拥有知识库一一神经网络内各神经元之间的联接权值.能根据输入力和位置的模糊划分,自行进行匹配,选择相应的权值;
4)无须进行建模,适用范围广,且实时性强。
关键问题位置伺服机器人的力控制最终是通过位置控制来实现,所以位置伺服是机器人实施力控制的基础。力控制研究的目的之一实现精密装配;另外,约束运动中机器人终端与刚性环境相接触时,微小的位移量往往产生较大的环境约束力。因此位置伺服的高精度是机器人力控制的必要条件。经过几十年的发展,单独的位置伺服已达到较高水平。因此,针对力控制力/位之间的强耦合,必须有效解决力/位混合后的位置伺服。
碰撞冲击及稳定性
就稳定性本身而言,就是机器人研究中的难题,再加入闭环力控制系统,难度更大,因此力控制稳定性为机器人控制中的重要环节。现有的研究主要从碰撞冲击和稳定性两方面进行突破。
未知环境的约束力控制研究中,表面跟踪为极为常见的典型依从运动。但环境的几何模型往往不能精确得到,多数情况是未知的.因此对未知环境的几何特征作在线估计,或者根据机器人在该环境下作业时的受力情况实时确定力控方向(表面法向)和位控方向(表面切向),实际为机器人力控制的重要问题。
力传感器机器人力觉传感器为主动柔顺控制研究必不可少的工具。传感器直接影响着力控制性,精度高(分辨率、灵敏度和线性度等沐可靠性好和抗干扰能力强是机器人力传感器研究的目标。就安装部位而言,可分为关节式传感器,腕部式传感器和手指式传感器。1
前景机器人的柔顺控制研究,实为智能机器人的基本功能之一一一力觉的研究。主动和被动的有机结合,对避免机器人与环境从非接触到接触的自然转换时的碰撞冲击,具有决定性作用,此为机器人柔顺控制的必然趋势.智能力控制策略中的记忆运算、比较、鉴别、判断、决策、学习和逻辑推理等概念和方法必须有效融合一起,作为人工智能的重要部分,也是机器人力控制和主动柔顺控制研究的发展趋势。有关于此的力控制和依从运动控制的实验和应用主要表现在如下几个方面:
(1)装配操作典型作业包括插销入孔,旋拧螺钉,摇转曲柄,搬运堆放重物等。控制效果的评价指标一般为装配间隙,受力状况和操作时间等方面。
( 2)表面跟踪典型作业包括擦洗飞机,括擦玻璃,修理工件表面(去毛刺,磨削或抛光等),跟踪焊缝,智能数控机床研制等。
( 3)双手协调要求两个或两个以上的机器人手臂在相互约束的条件下能够协调地工作。通常一个手臂主动,另一手臂在力控制下随动.双手协调为未来多臂机器人研究的基础。
( 4)灵巧手多手指协调,控制抓拿物体(如鸡蛋,乒乓球等)力的大小。
总而言之,机器人柔顺控制是一项综合性技术,现只处于理论研究阶段,技术实现正处于摸索阶段,离推广实用尚有一定距离。随着计算技术,智能控制理论等的飞速发展,必将取得满意的结果。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国