

简述
在智能机器人中,手眼系统是最具有代表性的,这些机器人可以用于进行物体识别、测量和控制。由于有了可以进行触摸的机械手,可以用视觉信息引导触觉系统的运动,同时触觉系统反过来又验证视觉系统的结果。一个典型手眼系统,可以用来识别普通的没有明显纹理特征及颜色相近的物品,这对于单纯的视觉系统来说是非常困难的。如果这时只利用视觉识别系统,那么就会缺少用以匹配及深度分析的特征。通过融合视觉信息和触觉信息可以有效地识别洞、坑和曲面形状等信息。2
工作步骤(1)首先利用二维视觉处理技术确定边界区域,利用立体视觉确定物体的质心。由此作为触觉探测的起点,同时立体视觉可以提供对深度和朝向的初步计算结果,并除去由遮挡、噪声等原区形成的孤立特征。在只有视觉处理的系统中,对于非稠密的深度只有通过内插来估计,借助于触觉可以大大提高内插的精度。
(2)利用触觉系统进一步检查视觉系统识别到的每个区域,以决定其是表面还是洞或坑。
(3)对于平滑区域,利用视觉和前面触觉的结果以及当前的触觉信息相融合,生成可与模型数据库相匹配的三维表面片,从与表面相连的位置开始,触觉通道利用结点决定表面踪迹的方向,将这些点沿着每条踪迹连接成最小平方多项式曲线,用以补充立体视觉处理过程中获得的信息。
(4)利用表面片和闭合曲线(对应孔或坑)与模型数据库相匹配,以得到与传感信息一敛的物体。若一致的物体多于一个,那么用概率测度对需要进行验证的物体进行排序。
(5)一旦确定了与数据库对应的物体,下一-步就需要对末被感知的特征进行验证。对于视觉上被遮挡的洞和坑需要用触觉感知来检测,但只靠触觉感知是很难的,因此视觉在这里所起的作用是是对触觉系统的引导和确定需要触觉探测的区域。3
分类根据摄像机与机器人的相互位置的不同,手眼系统分为Eye-in-Hand(EIH)系统和Eye-to-Hand(ETH)系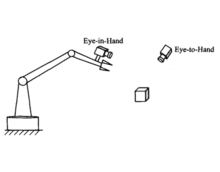 统。
统。
(1)Eye-in-Hand(EIH)系统:摄像机安装在机器人手部末端(End-Effector),在机器人工作过程中随机器人一起运动。
在Eye-in-Hand系统中,可以采用基于图像的视觉控制、基于位置的视觉控制以及结合两者的混合视觉控制。对于基于图像的视觉控制,因在图像空间形成闭环,摄像机的标定误差可以被有效地克服,因而对摄像机标定的精度要求不高。对于基于位置的视觉控制,虽然摄像机的标定误差不能在控制系统中被有效地克服,但随着目标的接近,测量出的目标位置的绝对误差降低,即使摄像机标定存在一定误差,一般也能够满足应用要求。同理,混合视觉控制对摄像机的标定精度要求也不是很严格。在实际应用中,Eye-in-Hand系统视野处在变化之中,不能保证目标一直在视场中,有时会存在丢失目标现象。4
(2)Eye-to-Hand(ETH)系统的摄像机安装在机器人本体外的固定位置,在机器人工作过程中不随机器人一起运动。1
在这类系统中,当机器人与目标达到一定距离,目标已经处在机械臂的操作范围时,机器人停止向目标移动。此后,根据视觉测量的结果,改由机械臂向目标移动,并对目标进行操作。一般地,机械臂向目标移动及操作时,会对目标造成遮挡,因此,基于图像的视觉控制和混合视觉控制不适合于这类任务。由于机械臂在向目标移动过程中,摄像机不随之一起运动,摄像机对目标的测量结果也就不再发生变化。由于此时摄像机与目标的距离较远,当摄像机标定精度不高时,会产生比较大的绝对误差。误差较大时,会导致机械臂不能到达目标。4
应用Eye-in-Hand系统在工业机器人中应用比较广泛,随着机械手接近目标,摄像机与目标的距离也会变小,摄像机测量的绝对误差会随之降低。
Eye-to-Hand系统在人形机器人、带机械臂的移动式机器人中具有广泛的应用前景。4

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国