

基本祖成
汽车自适应巡航控制系统主要由信息感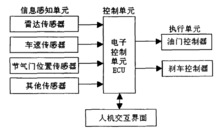 知单元、控制单元、执行单元和人机交互界面构成,其基本组成如图1所示。
知单元、控制单元、执行单元和人机交互界面构成,其基本组成如图1所示。
信息感知单元信息感知单元主要用于向电子控制单元(ECU)提供自适应巡航控制所需的车辆行驶状况及驾驶员的操作信号。它包括以下几种传感器:雷达传感器、车速传感器、节气门位置传感器、制动踏板传感器和离合器踏板传感器等。雷达传感器,安装在汽车前端,用来获取车间距离信号;车速传感器,安装在速器输出轴上,用于获取实时车速信号;节气门位置传感器,安装在节气门轴上,用于获取节气门开度信号;制动踏板传感器,安装在制动踏板下,取自制动灯开关信号,用于获取制动踏板动作信号;离合器踏板传感器,安装在离合器踏板下,用于获取离合器踏板动作信号。
控制单元控制单元以微处理器为核心,包括时钟电路、复位电路、电源电路、传感器输入接口电路以及与监控主机进行数据交换的串行通讯接口电路,用于实现系统的控制功能。ECU根据驾驶员所设定的安全车距及巡航行驶速度,结合雷达传送来的信息确定主车的行驶状态。当两车间的距离小于设定的安全距离时,ECU计算实际车距和安全车距之比及相对速度的大小,选择减速方式,同时通过报警器向驾驶员发出警报,提醒驾驶员采取相应的措施。
执行单元执行单元包括节气门执行器和制动执行器,节气门执行器用于调整节气门的开度,使车辆作加速、减速及定速行驶;制动执行器用于紧急情况下的刹车。
人机交互界面人机交互界面用于驾驶员设定系统参数及系统状态信息的显示等。驾驶员可通过设置在仪表盘上的人机交互界面(MMI)启动或清除ACC控制指令。启动ACC系统时,要设定主车在巡航状态下的车速和与目标车辆间的安全距离,否则ACC系统将自动设置为默认值,但所设定的安全距离不可小于设定车速下交通法规所规定的安全距离。1
ACC原理ACC模块为了保持车辆间的距离和速度,根据收到的雷达信息通过 CAN 总线向电子液压控制单元和发动机管理系统发出加速和减速的请求, 当发动机管理系统不能够完成减速任务时, 就由电子液压制动系统的自动制动功能来完成,并不需要驾驶员踩制动踏板。在 ACC的自动制动模式中,驾驶员如果踩下制动踏板, ACC模块就会根据制动踏板的位置信息和主缸压力信息退出正在进行的自动制动模式。 发动机管理系统如果传递出驾驶员踩下加速踏板的信息, ACC 模块也会退出自动制动模式。如果发动机管理系统发布的是驾驶员没有踩加速踏板, 而 ACC系统继续要求减速, 系统就会再次进行自动制动。 自动制动的目的是平稳地跟随目标车辆, 并且在需要时能安全平稳地停止下来。 所以制动的平稳性是系统必须考虑的。
ACC工作过程汽车自适应巡航控制系统工作示意图如图2所示。当主车前 方无行驶车辆时,主车将处于普通的巡航行驶状态,ACC系统按照设定的行驶车速对车辆进行匀速控制。当主车前方有目标车辆,且目标车辆的行驶速度小于主车的行驶速度时,ACC系统将控制主车进行减速,确保两车间的距离为所设定的安全距离。当ACC系统将主车减速至理想的目标值之后采用跟随控制,与目标车辆以相同的速度行驶。当前方的目标车辆发生移线,或主车移线行驶使得主车前方又无行驶车辆时,ACC系统将对主车进行加速控制,使主车恢复至设定的行驶速度。在恢复行驶速度后,ACC系统又转入对主车的匀速控制。当驾驶员参与车辆驾驶后,ACC系统将自动退出对车辆的控制。1
方无行驶车辆时,主车将处于普通的巡航行驶状态,ACC系统按照设定的行驶车速对车辆进行匀速控制。当主车前方有目标车辆,且目标车辆的行驶速度小于主车的行驶速度时,ACC系统将控制主车进行减速,确保两车间的距离为所设定的安全距离。当ACC系统将主车减速至理想的目标值之后采用跟随控制,与目标车辆以相同的速度行驶。当前方的目标车辆发生移线,或主车移线行驶使得主车前方又无行驶车辆时,ACC系统将对主车进行加速控制,使主车恢复至设定的行驶速度。在恢复行驶速度后,ACC系统又转入对主车的匀速控制。当驾驶员参与车辆驾驶后,ACC系统将自动退出对车辆的控制。1
典型应用场景在ACC系统的实际应用中,主要包括平稳跟车 、前车换道插入、前车换道离开、远处接近前车以及前车急刹车这5种典型的交通场景,如图3所示。在现实生活中,实际的交通场景无论多复杂,基本都是由这五种场景组合而成。2
、前车换道插入、前车换道离开、远处接近前车以及前车急刹车这5种典型的交通场景,如图3所示。在现实生活中,实际的交通场景无论多复杂,基本都是由这五种场景组合而成。2
ACC系统的间距策略在汽车ACC系统的信号控制单元中,问距策略决定了行驶过程中采取的安全跟车间距,为后续的ACC控制算法提供参考间距输入值,是设计ACC控制系统的第一步。过小的间距策略容易引发交通事故,而过大的间距策略不仅损失了道路的交通通行能力,而且容易导致临近车道车辆的换道插入.可见,间距策略设计的好坏直接决定了行驶过程中的安全性、跟车性以及道路的使用效率等。现有的间距策略主要可以分为两大类:固定间距策略和可变间距策略。
固定间距策略固定间距策略就是在行驶的过程中始终保持一个恒定的车间距,而与当前行驶环境无关。这种间距策略结构简单,计算量少,但对间距值的选择提出了极大的挑战,既要兼顾到各种复杂的行驶环境,又要尽可能保证行驶的安全并改善交通流。但是,这种固定的间距策略无法适应一些复杂多变的行驶环境,无法平衡行驶过程中的多个控制目的,在缺乏车车通讯的情况下会导致ACC队列的不稳定。针对固定间距策略的不足与缺点,研究学者提出了随着行驶环境而变化的可变间距策略。
可变间距策略在可变的间距策略中,具有代表性的主要有基于车头时距的安全间距策略以及仿人间距(HFD)策略。其中,基于车头时距的间距策略又可分为恒定车头时距(CTH)策略和可变车头时距策略。2
ACC的作用(1)通过车距传感器的反馈信号,ACC控制单元可以根据靠近车辆物体的移动速度判断道路情况,并控制车辆的行驶状态;通过反馈式加速踏板感知的驾驶者施加在踏板上的力,ACC控制单元可以决定是否执行巡航控制,以减轻驾驶者的疲劳。
(2)自适应巡航控制系统一般在车速大于25 km/h时才会起作用,而当车速降低到25 km/h以下时,就需要驾驶者进行人工控制。通过系统软件的升级,自适应巡航控制系统可以实现“停车/起步”功能,以应对在城市中行驶时频繁的停车和起步情况。自适应巡航控制系统的这种扩展功能,可以使汽车在非常低的车速时也能与前车保持设定的距离。当前方车辆起步后,自适应巡航控制系统会提醒驾驶者,驾驶者通过踩油门踏板或按下按钮发出信号,车辆就可以起步行驶。
(3)自适应巡航控制系统使车辆的编队行驶更加轻松。ACC控制单元可以设定自动跟踪的车辆,当本车跟随前车行驶时,ACC控制单元可以将车速调整为与前车相同,同时保持稳定的车距,而且这个距离可以通过转向盘附近的控制杆上的设置按钮进行选择。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国