

预测控制
一般来说,采样控制算法而非连续控制算法,作为预测控制的表现形式,这是因为计算机是预测控制的实现手段。预测控制,是指利用内部模型的输出或状态来进行预测,与此同时,采取反馈校正和有限时域滚动优化的思想,对系统的某个性能指标进行最优计算,并且依据这个最优化的计算结果来确定一个控制时域内最优的控制序列。
预测控制算法是一种计算机优化控制算法,它是基于预测模型来对系统未来输出进行预测的,结合闭环反馈校正滚动实施优化控制。以预测控制的基本原理为基础,对于同一个系统,可以得到不同的预测控制算法,这是通过采用不同的优化策略、模型形式和校正措施实现的。最为常用的三种控制算法分别是动态矩阵控制(DMC)、广义预测控制(GPC)和模型算法控制(MAC)。1
动态矩阵预测控制简介动态矩阵预测控制算法(DMC)采用了增量算法,是基于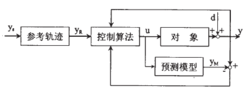 系统阶跃响应的算法,在控制中包含了数字积分环节,对消除系统静差非常有效,这是DMC算法的显著优越之处。一般来说,DMC对于弱非线性系统,可先对工作点进行线性化处理,然后按照线性系统的方法进行控制;DMC通常适用于渐近稳定的线性对象,面对不稳定装置的时候,一般可先用常规PID控制使其稳定,然后再使用DMC算法。
系统阶跃响应的算法,在控制中包含了数字积分环节,对消除系统静差非常有效,这是DMC算法的显著优越之处。一般来说,DMC对于弱非线性系统,可先对工作点进行线性化处理,然后按照线性系统的方法进行控制;DMC通常适用于渐近稳定的线性对象,面对不稳定装置的时候,一般可先用常规PID控制使其稳定,然后再使用DMC算法。
DMC的工作原理框图如图1所示。2
动态矩阵预测控制的基本原理预测模型DMC算法利用先验信息,建立基于阶跃响应的模型,该模型没有结构限制,较易建立,有很强的功能性,且校正算法简单,避免了对模型复杂的辨识过程,比较易于在控制器中实现,在阶跃响应系数的测取时,可以对被控过程在同一条件下多次测量求取平均值或加权,得到较为精确的预测模型。1
设被控对象单位阶跃响应的采样数据为 。对于渐近稳定的系统,其阶跃响应在有限N个采样周期后将趋于稳态值,即
。对于渐近稳定的系统,其阶跃响应在有限N个采样周期后将趋于稳态值,即 。因此可用单位阶跃响应采样数据的有限集
。因此可用单位阶跃响应采样数据的有限集 合来描述系统的动态特性,该集合的参数便构成了DMC算法中的预测模型参数。系统的单位阶跃响应
合来描述系统的动态特性,该集合的参数便构成了DMC算法中的预测模型参数。系统的单位阶跃响应 称为DMC的模型向量,N称为建模时域长度,N的选择应使
称为DMC的模型向量,N称为建模时域长度,N的选择应使 (i
(i

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国