

基本简介
摆式积分陀螺加速度计是利用在自转轴上有一定摆性的积分陀螺来测量比力的装置。多用于导弹制导系统。由积分陀螺、伺服电机和单轴转台等组成。在陀螺的自转轴上,有一个偏离输出轴一定距离的不平衡质量,形成摆。当沿输入轴有加速度作用时,惯性力矩使摆绕输出轴转动,角度传感器即产生一个正比于框架转角的电压信号,经放大后送入伺服电机、使装有陀螺的转台转动而在陀螺框架上产生一个陀螺力矩来平衡惯性力矩,使陀螺转子轴趋向于零位。单位时间内转台的转角即加速度的量度3。
摆式积分陀螺加速度计(以下简称陀螺加速度计)是惯性制导系统的核心仪表,其精度的高低会直接影响惯性制导系统的控制精度,现有的陀螺加速度计其外环采用传统的滚珠轴承支撑,因此仪表外环轴存在摩擦力矩。
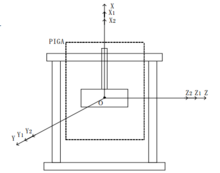
设计原理陀螺加速度计结构原理如下图,陀螺加速度计的壳体坐标系为OXYZ,外环坐标系为 OX1Y1Z1,壳体坐标系与外环坐标系重合,即 OX轴与外环轴 OX1 重合, OY1、 OZ1 与 OX1 垂直取向, 内环坐标系为 OX2Y2Z2,其中 OZ2 为马达角动量方向,OY2 为陀螺摆的输出轴。陀螺加速度计输入轴定义为外环轴 OX1 方向,此轴又是陀螺加速度计的输出轴。陀螺加速度计输出的误差模型为:

其中,α 为加速度计输出值;k0为加速度计零位偏值; k1 为加速度计标度因数;
k1δ 为安装误差角系数; k2x 、 k2y 为二阶非线性系数; ax 、ay 为沿加速度计 OX 轴、OY 轴方向的线加速度;ε 为随机误差项4。
工作原理积分陀螺加速度表(PIGA)被广泛用于火箭和导弹的射程控制系统,用来测量载体的视加速度,其工作原理是利用摆性m·l在视加速度a的作用卜,构成摆力矩m·l·a作用在仪表内环轴上,由陀螺所敏感,输出与视加速度成正比的角速度信号。显然,作为射程控制敏感器件,希望其刻度因数K具有高的稳定性,在各种环境条件下,仪表刻度因数K维持不变。稳定性用刻度因数的相对变化△K/K表示,希望相对误差小于1X10。刻度因数k与仪表内部结构的许多因素有关,可用公式表示为:

H = JΩ
式中,m-仪表的偏心质量;
l-偏心质量中心至内环轴的距(摆长);
H-仪表的角动量;
J-仪表飞轮的转动惯量;
Ω-马达转速。
可见。刻度因数是摆长l,马达转速Ω和转动惯量J的函数,其中唯摆长l的变化最为复杂。为目前尚无高精度的测量方法,确定一个复摆的摆长大小,更难控制在各种条件下这个摆长的变化。但是只有掌握摆长变化的规律,仪表的精度才会随之提高,因而有关摆长的变化规律及其对积分陀螺加速度表影响的研究,受到广泛的重视。通常所谈的仪表精度不稳定,大多数是指摆性的热效应,即摆长受热的于扰引起线性膨胀,温度升高时摆长受热变长,仪表的刻度因数变大;相反温度降低时摆长变短,仪表的刻度因数变小。这种热干扰来自环境温度的波动,或者来自仪表本身。陀螺仪表是个自热装置,陀螺马达电功热要连续传导至仪表的各部份,使零件温度升高。仪表在无温控的条件下工作,要在很长时间后,才能使各零组件达到动态热平衡。此外,不仅仅是温升所引起的摆长的线膨胀,而且还有温度场的不均匀,温度变化引起的变形以及温度对马达飞轮转动惯量的影响等等,都需要有一个逐渐平衡和稳定过程,所以仪表的刻度因数很难维持在一个固定值上。这对仪表精度的评定和使用是很不利的,故国内外专家都很重视这方面的研究,力图通过各种技术途径,包括仪表的恒温控制,构件材料膨胀系数的匹配,零件及结构的等刚度设计、降低马达功耗等等方法,,以求减小摆性的热效应误差5。
研究成果外环摩擦试验研究陆仲达,徐凤霞 ,曾鸣等在中国惯性技术学报发表《分离摆式积分陀螺加速度计外环摩擦试验研究》中,为分离摆式积分陀螺加速度计外环摩擦力,提出一种在高精度三轴转台上测试摆式积分陀螺加速度计的新试验方法。该试验采用三轴转台中环转动速度随动摆式积分陀螺加速度计外环进动角速度,从而分离仪表外环轴摩擦力的方案。为研究三轴转台存在的动不平衡对摆式积分陀螺加速度计测试试验的影响,建立了三轴转台的动不平衡模型,分析了三轴转台的动不平衡对转台定位精度的影响,并通过提高三轴转台的带宽和改变工作点来获得高的定位精度,消除三轴转台的动不平衡扰动影响,完成分离摆式积分陀螺加速度计的外环摩擦力的试验。通过对试验数据进行分析,得出外环摩擦力的存在影响了摆式积分陀螺加速度计精度,为进一步改进仪表结构以提高仪表的精度提供了试验研究基础。
试验中采用了三轴空气轴承转台,并对转台中存在的动不平衡力矩进行了分析和抑制,消除了试验测试设备精度对仪表测试结果的影响,通过原理分析及试验结果可以得出,由于转台中环框架具有比仪表外环组件大得多的转动惯量以及被气浮之后很小的干扰力矩,有利于分离陀螺加速度计的外环摩擦试验。试验数据可以看出由于存在仪表外环轴摩擦,会对加速度计的精度产生很大的影响,因此可以采用减小轴承摩擦的方法,选用摩擦力较小的轴承或采用浮外环的方法来提高仪表的精度,为改进加速度计的工艺和补偿外环干扰力矩对加速度计误差模型的影响提供试验基础4。
重力效应研究刘希杰,易维冲在导弹与航天运载技术《积分陀螺加速度表摆性的重力效应》研究了摆性的另一种效应,即摆长在重力场作用卜的变化。我们注意到了这样一种现象,当将仪表的外环轴分别垂直安装和水平方向安装后,仪表所测得的刻度因数不同,而且水平方向安装后,仪表的刻度因数离散增加,使仪表的精度卜降。因为其他条件完全相同,仅仅改变了安装方向,所以首先分析在不同安装方向下仪表所出现的变化。当仪表外环轴垂良方向安装时,仪表摆轴与重力场方向相垂直,重力场不改变摆长的大小。而当外环轴水平安装时(图2),摆轴可以绕外环轴在垂直面内转动,停留在任意位置。当摆轴角动量H朝下时,摆轴方向与重力场方向一致,摆长在重力作用下“拉伸变长”;相反,摆轴角动量H朝上时,摆长“压缩变短”,这种类似乎在重力作用下的“拉伸”和“压缩”现象,改变了仪表的刻度因数。故而我们这种现象为摆性的重力效应。通过仪表的多次试验证明了这种现象的客观存在。下图表示了测试数据的规律。当一个仪表的摆锤朝上状态放置一段时间(实验时通常放置8h以上)。然后进行测量,再将仪表的摆锤朝下状态放置一段时问,进行测量,所得到的K值与标准K值的差为△K,△K与标准K位的比K/K就是仪表的相对误差(标准K值是指仪表正常测试时所得到的仪表刻度因数)。下图中表示5个仪表的测试结果。每个仪表测试3次,其中△K位都超过了规定的卡关值5。
对于一个精密陀螺仪表,马达装配质量是至关重要的,马达装配质量不仅仅局限于一般的技术指标要求,如工作电流,运转时间,动不平衡精度等等,虽然这典指标说明了马达本身的工作质量。对陀螺仪表来说,还应当更加关心马达质心的稳定性,质心的稳定与否,改接影响陀螺精度,而又难以预测和控制。摆性的重力效应就是质心不稳定的反应。结构和工艺的改进能改善质心稳定性,使仪表精度不断提高5。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国