

同步控制方案
最传统的同步控制方式是通过机械轴承来实现对多台电机的联动控制,通过一些机械驱动装置将各个单元契合在轴承之上,当其中某一单元的转速改变时,该单元就会产生相应的弹性扭矩,通过齿轮箱将弹性扭矩传递到机械总轴上,使得机械总轴的旋转速度发生相应的变化,这就会导致其他单元的速度也会随着扰动单元速度而变化,因此外界扰动所引起的不同步,在机械总轴控制方式下不能很快恢复同步的运行状态。
同等方式(SMCA)同等方式又称并行方式,在这种同步控制下,根据要求分别给各个被控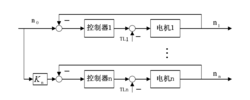 对象发送控制命令,从而使各个单元能够有着与理想一致的输出结果。在同等控制方式中,系统中的每个单元分别受到控制,各个单元之间的相互作用小,系统的输出稳定,动态性能好,当前这种控制方案在诸多制造业中得到广泛的应用。
对象发送控制命令,从而使各个单元能够有着与理想一致的输出结果。在同等控制方式中,系统中的每个单元分别受到控制,各个单元之间的相互作用小,系统的输出稳定,动态性能好,当前这种控制方案在诸多制造业中得到广泛的应用。
同等方式的控制结构简单,在工业控制中,采用 PID 控制器也可以达到一定的精度,但是这种方式的缺点也是显而易见的,由于各电机都是属于一个独立的系统,它们之间互不影响,所以当其中一台或多台电机受到外界干扰时,这些电机的转速就会有一定的波动,而别的电机却不会受到影响,那么这些电机之间就失去了同步的关系,虽然经过 PID 控制器在一段时间后会恢复之间的同步关系,当在扰动的瞬间会导致转速差较大,在一些对同步精度要求较高的场合,这种情况是不允许的。
主从式(MSA)主从方式指在有这个多个被控对象的系统中,以其中一个被控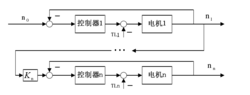 对象的输出作为参考输入,其他的被控对象根据参考输入按一定的比例运行,达到理想的输出效果,在这种控制方式下,各个单元都能快速跟随参考对象,有着很好的跟踪效果,从而达到同步控制的目的1。
对象的输出作为参考输入,其他的被控对象根据参考输入按一定的比例运行,达到理想的输出效果,在这种控制方式下,各个单元都能快速跟随参考对象,有着很好的跟踪效果,从而达到同步控制的目的1。
交叉耦合控制(CCC)交叉耦合同步控制方法于 1980 年由美国密歇根大学Y.Koern 针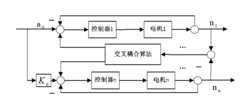 对双轴运动平台首先提出,用于解决多电机系统中由于外界因素造成的各个单元的不协调运行问题,通过建立起系统中各个被控对象之间的耦合关系来实现协调运行,这种控制策略能够根据要求完成同步反馈控制,极大的提高了同步精度。
对双轴运动平台首先提出,用于解决多电机系统中由于外界因素造成的各个单元的不协调运行问题,通过建立起系统中各个被控对象之间的耦合关系来实现协调运行,这种控制策略能够根据要求完成同步反馈控制,极大的提高了同步精度。
在交叉耦合同步控制策略下,各电机能够根据转速的变化通过所设计的交叉耦合算法来及时调整各电机的转速,使各个被控单元能够快速达到同步。交叉耦合同步控制策略已经用于实际中,在实际的工业场合,常根据各个单元之间的速度差来建立耦合算法,通过速度的差值来建立反馈补偿。在 1990年美国俄亥俄州立大学的 K.Srinivasan 教授曾用交叉耦合算法设计了一种控制器,控制器的参数可以通过系统运动轨迹的斜率进行实时调整,使得控制器具有很好的时变特性。
控制方案发展偏差耦合控制偏差耦合控制是在交叉耦合控制方案上的发展,它改正了交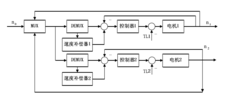 叉耦合控制方案中的一些缺点并提高了同步控制精度,偏差耦合控制的控制核心是将系统中的各个单元的输出进行比较,利用它们速度之间的同步误差建立起补偿反馈,
叉耦合控制方案中的一些缺点并提高了同步控制精度,偏差耦合控制的控制核心是将系统中的各个单元的输出进行比较,利用它们速度之间的同步误差建立起补偿反馈,
环形耦合控制环形耦合控制是在同等方式的基础上建立起各个单元之间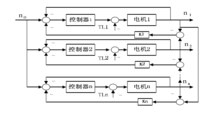 的速度补偿形成的,为了使系统中的被控对象能够协调与运行,环形耦合控制策略同时考虑了被控对象的输出与给定输出之间的误差关系以及相邻单元之间的输出误差关系。
的速度补偿形成的,为了使系统中的被控对象能够协调与运行,环形耦合控制策略同时考虑了被控对象的输出与给定输出之间的误差关系以及相邻单元之间的输出误差关系。
基于智能控制的同步控制策略在经典控制理论和现代控制理论中,必须建立起被控对象精确的数学模型才可以对控制系统进行设计和分析,考虑到现实工业控制中的一些复杂的系统,难以建立其精确的数学模型,难以完成在经典控制理论下的控制器设计,为了解决这类问题,人们将智能控制技术应用于实际系统的控制器设计当中,用以解决一些复杂系统的控制算法设计问题。在多电机的速度同步控制系统中,当前研究较多的智能控制算法有模糊控制、神经网络控制、自适应控制等。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国