

研究历程
传统的静态失速认为,当翼型来流迎角增大到某一定值时,在翼型表面会出现大规模流动分离而导致升力突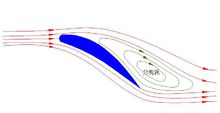 然下降和阻力的突然增加。
然下降和阻力的突然增加。
在20世纪40年代,Himmelskamp首次在实验中发现了动态失速现象的存在。但由于当时人们对航空器的机动性要求不高而且分析手段有限,所以并未对这一现象进行深入研究。
直到60年代一次直升机旋翼实验后才引起普遍关注,关于动态失速性能的研究也随之展开。Ham最早给出了关于动态失速发展过程的理论描述。进入70年代后,McCroskey等对动态失速现象作了许多实验研究,使得人们对动态失速的发生机理有了更进一步的认识。1988年Carr L W在他的文章中指出,动态失速的基本特征是流畅中存在复杂的非定常分离和大尺度漩涡结构,气动力表现出明显的非线性迟滞特性。1998年Ekaterinaris等对过去人们研究翼型动态失速所采用的数值方法和研究成果进行了比较全面的总结,表面翼型俯仰运动的折合频率、振幅角、平衡迎角、转轴位置和来流马赫数等因素都对失速涡的强度、发展和脱离有着直接影响,同时翼型的几何形状也极大的影响动态失速特性。
与传统静态升力不同,动态失速现象是个非常复杂的非线形问题。如果想得到精确的解则必须求解NS方程,而解NS方程一方面所需计算时间比较久,另一方面由于是强烈的分离流动,选择合适的湍流模型也很困难。所以现在工程上一般使用经验或者半经验的动态失速模型来预测升力曲线。2
动态失速控制动态失速控制的主要目的是既要保持动态失速所具有的优势——最大升力有较大增加,同时又要降低阻力和负的气动阻尼。动态失速涡的形成、移动以及脱出表征了动态失速的特性,它是升力增加、大的阻力以及危险的俯仰力矩峰的来源。而该涡是在前缘附近形成的,因此动态失速控制装置如果位于前缘附近则会更有效的影响动态失速特性。
已经有几种动态失速控制装置进行了研究:固定前缘条能完全避免动态失速涡,但在前行桨叶上有不可接受的性质;弹性改变前缘半径可以在动态失速涡形成区非常局部地影响动态失速,但这种装置非常不宜应用于旋翼;人为喷气概念是更进一步的装置,它不仅在定常分离方面有优势,在动态失速控制方面也有优势,这里靠近翼型前缘喷气的位置确定装置恰当与否,喷气可以打开和关闭,因此与旋转桨叶相配,对于旋翼桨叶应用应是在后行桨叶上能起作用而在前行桨叶上又不会是一个干扰。1
研究方法CFD法是目前动态失速预测的一种重要方法。一般地说,非定常流CFD计算能以几个级别来处理,以能力递增来排列,它们是:
(1)使用面元法的无粘/不可压(位流)解;
(2)不可压的粘性附面层法;
(3)粘性-无粘迭代法;
(4)纳维尔-斯托克斯法。
Sankar等介绍了三种CFD方法预测翼型动态失速情况的比较,这三种CFD方法分别是:
(1)乔治亚工学院隐含时间进程法,使用Spalart-Allmaras紊流模型。
(2)ONERA纳维尔-斯托克斯法,使用Spalart-Allmaras紊流模型。
(3)ONERA粘流-无粘流迭代法,使用两方程模型。
Datta和Chopra以UH-60A直升机为例详细地研究了CFD方法预测旋翼动态失速的能力。研究共分三个阶段进行:
第一阶段使用测量的气动载荷、阻尼器载荷和操纵角来验证结构模型。采用非线性挥舞-摆振-扭转耦合方程,并推广到在轴向延伸和弹性扭转中包括弯曲非线性。阻尼器力作为一组集中力和力矩施加到结构上。变距拉杆被模拟为挥舞、摆振和扭动线形弹簧和阻尼器。
第二阶段使用给定的桨叶变形计算气动载荷,气动载荷计算使用具有Leishman-Beddoes动态失速的非定常升力线模型、以及具有与升力线形模型相同的自由尾迹的单桨叶RANS CFD模型,因此它们不仅有相同的桨叶变形而且有相同的入流。升力线模型得出配平角后,在CFD模型中保持不变。
第三阶段使用CFD/CSD松耦合由第一原理预测动态失速载荷,CFD采用跨音速非定常旋翼纳维尔-斯托克斯程序,CSD采用马里兰大学先进旋翼飞机程序。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国