

研发历程
“隼鸟”(Hayabusa)探测器是日本的小行星探测器,原名缪斯-C(MUSESC),由日本宇宙科学研究所研制,于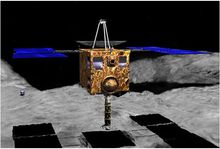 2003年5月9日用M-5运载火箭从鹿儿岛航天中心发射。任务目的是探测一颗名为“糸川”的小行星并采样返回,是世界上首个实现在小行星上软着陆并采样返回的探测器。探测器的设计、研制工作历时7年。
2003年5月9日用M-5运载火箭从鹿儿岛航天中心发射。任务目的是探测一颗名为“糸川”的小行星并采样返回,是世界上首个实现在小行星上软着陆并采样返回的探测器。探测器的设计、研制工作历时7年。
“隼鸟”探测器通过借力飞行,于2005年9月中旬到达小行星“糸川”,对其形状、地形、颜色、组成、密度等进行了研究。2005年11月,探测器2次在小行星“糸川”上着陆并完成采样。由于探测器在轨运行过程中出现了一系列故障,如探测器姿态控制系统中的3个飞轮中有2个出了故障,因此不得不利用余下的1个飞轮和氙微波离子电推力器进行控制和操作;完成在小行星“糸川”表面下降和着陆后,探测器的化学推进系统出现燃料泄漏,推力降低,无法工作,蓄电池发生故障等,导致探测器未按计划返回地球,探测器最终于2010年6月13日返回地球,回收成功。通过对“隼鸟”探测器采集的样品进行分析和研究发现,小行星“糸川”是一颗较大的小行星的一部分,已有800万年的历史。1
任务“隼鸟”探测器完成了5项主要任务:利用日本自行研制的离子发动机实现星际飞行,用光学测量敏感器提供的信息确认小行星“糸川”所在的位置,通过自主导航完成寻的,接近目标或改变位置;在具有微重力的小行星“糸川I”上完成着陆并进行采样;完成地球借力飞行;将采集的样品带回地球。
“隼鸟”探测器在轨道上完成了工程试验和科学实验2类任务。在工程领域,探测器完成的任务包括以日本自行研制的离子发动机作为主推力器,通过自主导航在地球一小行星一地球之问飞行,通过在距小行星“糸川”54m处向其投放目标标识器,确定准确的着陆目标,确保在选定的着陆点安全着陆,并验证了探测器往返于地球与目标天体(小行星)间的飞行技术;实现了利用光学测量敏感器提供的信息进行自主导航的技术;掌握了在微重力环境下:行星表面采样并将样品带回地面的技术。在科学领域的研究成果包括:掌握了在近地轨道型小行星的主要特征;查并掌握了小行星与陨石之间的关系,并为开展小行星的起源与演化研究打下基础。1
性能参数探测器质量为510kg,六面体结构,尺寸为1.0m×1.6m×2.0m,采用三轴稳定,配备可折叠式刚性双太阳翼.单个太阳翼翼展5.7m。探测器在近日点为1.0AU、远日点1.44AU的太阳圆轨道上运行。
探测器由服务舱、有效载荷舱组成,其中服务舱包括结构、热控、电源(太阳翼和蓄电池)、通信、数据处理、姿态轨道控制、反作用推进系统和电推进系统;有效载荷系统包括飞行任务仪器系统、采样器、再入密封舱和跳跃式机器人。1
工作过程飞行隼鸟号探测器是日本宇宙航空研究开发机构利用即将返回地球的隼鸟号小行星探测器,对正在研发的小行星撞击地球预测系统的精确度进行测试,这再次引起了人们对隼鸟号航天器的关注。
重量为495千克、太阳能电池板展后长约5米的隼鸟号探测器是采用离子火箭发动机飞向丝川小行星的。这种动力装置的工作原理是,其工质氙从贮箱经过电离室被分解为正、负离子后,带正电的离子流在引出电极的静电场力作用下加速形成射束。离子射束与中和器发射的电子耦合形成中性的高速束流,喷射而出产生反作用推力。在隼鸟号环绕丝川小行星运转期间,仍以离子火箭发动机提供动力。直到2005年11月9日,隼鸟号探测器已遭遇过几次困境:太阳耀斑损坏了其电力储存电容器,3个姿态控制仪已损坏了2个,只有1个还在正常运转。
丝川小行星原定编号为1998SF 36,意即它是1998年9月下半月发现的第906颗小行星。其轨道与地球平均距离约3亿千米。它的外形如马铃薯,长约540米,宽约300米,体积较小。日本为了纪念本国的火箭之父丝川英夫博士,经向国际天文联合会小行星专业委员会申请并得到批准,才将其命名为丝川小行星。
自2005年11月10日开始,隼鸟号探测器的动力装置已转为使用化学火箭助推器,因为离子火箭发动机虽然可以精确控制方向,但费时较长。探测器上带有足够的助推器燃料,以保证隼鸟号能够圆满完成这次飞行任务。2
投放观测器失败在距离丝川小行星20千米高的轨道上运行期间,隼鸟号探测器就进行了环绕飞行的探测工作。它用自身携带的X射线和红外线仪器观测目标星体表面情况,收集其成分和地形数据。2005年10月份,隼鸟号陆续降低运行高度,进一步接近小行星,从10千米之内对其进行观测。在这两个不同的运行高度上实施探测过程中,它已把获得的数据资料用无线电信号发回地面,供科学家们进行研究。
2005年11月初,隼鸟号继续降高,逐步靠近丝川小行星。按照预定计划,它于11月12日应在距离目标星60米~70米的高度上投放名叫智慧女神的观测器。形状如同罐子、只有10厘米长的智慧女神,实际上是个小型探测机器人。赋予它的任务是,前往丝川小行星采集数据,为隼鸟号无人探测器20日和26日两次登陆这个小行星作准备。
遗憾的是,12日下午3时8分,地面指挥人员向隼鸟号下达了投放观测器的指令,并经16分钟传递到探测器上实施投放以后,观测器未能在丝川小行星上着陆。事后查出的原因表明,乃系投放高度大大超出预定距离所致。发出指令的当时,隼鸟号离小行星丝川仅55米,而后转向上升,结果在距离丝川200米的高度上投下了观测器,滞后于最佳时机,造成日本首次向地外天体投放观测装置失败。
智慧女神失踪的当晚,仍能通过无线电波与隼鸟号探测器联系,曾一度和地面监控室保持通信,后因机器人天线出现问题而中断了信号来往。它在与地面通信期间,已发回隼鸟号部分太阳能电池板照片,还有其内部温度和姿态的信息。2
着陆虽然投放的观测器迷失目标,但是隼鸟号自身功能却很正常。同时,令研制者们欣慰的是,这次智慧女神的着陆预演对隼鸟号最终着陆所需的程序和设备进行了检验,使地面控制小组能够以更好的准备保证对小行星采样的成功。这使日本宇航研发机构决定继续执行原来计划,在2005年11月20日和26日让隼鸟号两次短时间的着陆丝川小行星,采集其表面的岩石样本。
20日凌晨,隼鸟号按照地面遥控指令于当日上午6时前,在离丝川10米的距离通过小行星引力自然下落,6时10分左右,在预定着陆目标的30米内着陆,随即在星面跳动两次,约停留30分钟,然后按地面人员的指令离开小行星地面。
按原定计划,隼鸟号一旦触到丝川,内部的汽枪就立即发射直径约1厘米、重为5~10克的掷标金属球钽弹,在小行星的硬壳上打出一个小孔,并用喇叭形的专门取样装置把溅起的一缕灰尘收进探测器的底舱。隼鸟号将在小行星上停留1~2秒,一旦完成采样任务,它就飞行到8.4千米高的轨道将信息传回地球,本身继续进行环绕飞行。
然而,由于感知着陆的装置没有发挥作用,尽管隼鸟号在丝川表面停留时间大大超过规定时限,但它却未能发射金属球,导致第一次采样活动以失败告终。同时,它离开丝川后一下上升到约100千米的轨道位置,比要求的距离高度超出许多,姿态控制也出现问题。
实际上,隼鸟号尝试着陆丝川小行星时,其位置和速度数据出现了问题,控制人员立即向它发出了上升指令,但没有反应。日本宇宙探索局一度宣布隼鸟号处于失踪状态。当日上午9时30分左右,中断了约3个小时的联系才得以恢复。联系中断后,隼鸟号转为自动控制,储存自身数据,并在恢复联系后将其发回地面控制中心供研究人员分析。上述着陆成功但未能采集样本情况,就是通过仔细分析传回地面的数据资料而得出的结论。
在隼鸟号与地面控制中心恢复联系后,经地面人员努力,于21日姿态控制恢复正常,并再次接近丝川小行星。当日下午已抵达距离丝川50千米处,22日又拉近了两者的位置,为再次登陆和取样做好了准备。
26日,隼鸟号重新登陆当时距离地球2.9亿千米的丝川小行星。这次停留时间较短,只有几秒钟,基本符合计划要求,问题是尚难确定它是否采集到星面样本。在它飞离丝川小行星后,已将数据资料发回地面,并按地面发出的返航指令,先围绕小行星飞行,再踏上返回地球的归程。照原来设定,隼鸟号探测器的返回舱应于2007年6月再入地球大气层,在降落伞的作用下逐渐减速,最终着陆于澳大利亚的南部沙漠中。只有收到返回舱后,它是否采集到小行星样本才会有定论。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国