

简介
姿态与航向控制系统以全姿态组合陀螺作为飞机上的中心陀螺仪,通常由磁传感器、全姿态组合陀螺、放大器、指示器、控制盒和操纵台等组成。其主要的部件是全姿态陀螺,它可实时测量、显示飞机的飞行航向和姿态等导航信息。即确定飞行中的机体坐标相对与地面的位置及机头的方向等信息。2
工作原理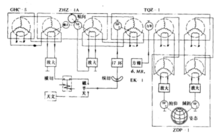 以国内生产的HZX-2T姿态与航向控制系统为例说明其工作原理。
以国内生产的HZX-2T姿态与航向控制系统为例说明其工作原理。
HZX-2T由GHC-5磁感应传感器、TQZ-1全姿态组合陀螺、ZHZ-4A综合航向指示器、FZ-3综合放大器、EK一4控制盒、EJ-8继电器盒、TQZ-1全姿态指示器及ZDP-1地平指示器组成。
该系统能显示和输出磁航向、陀螺航向、电台相对方位角、电台磁方位角、飞机俯仰角、倾斜角信号,是专供机载测试用的系统。
该系统传动关系如右图1所示。图中未画出EJ-8继电器盒,但画出了EK-4控制盒上的方位修正信号及状态选择开关和放大器。横向切断由XJS-1控制,纵向切断和17°环设在组合陀螺中,陀螺的结构如右图2所示。2
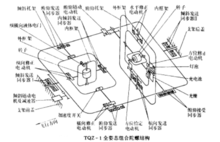 该组合陀螺就相当于垂直陀螺的倾斜托架上加装了一个带俯仰托架的航向陀螺。由于两个陀螺被各自的托架稳定,保持垂直陀螺三轴始终垂直,转子轴跟踪地垂线;保持航向陀螺三轴始终垂直,转子轴跟踪子午线。这样,陀螺能在任何飞行状态下,输出飞机的俯仰角、倾斜角和航向角信号。2
该组合陀螺就相当于垂直陀螺的倾斜托架上加装了一个带俯仰托架的航向陀螺。由于两个陀螺被各自的托架稳定,保持垂直陀螺三轴始终垂直,转子轴跟踪地垂线;保持航向陀螺三轴始终垂直,转子轴跟踪子午线。这样,陀螺能在任何飞行状态下,输出飞机的俯仰角、倾斜角和航向角信号。2
垂直陀螺复现地垂线,敏感飞机的倾斜角、俯仰角信号,通过远距传输装置在指示器上显示飞机俯仰、倾斜角度而组成姿态系统。
当飞机倾斜时,壳体与倾斜托架及垂直陀螺外框轴一起倾斜、外框轴上的定子相对于垂直陀螺外框轴上的转子转动而输出内倾斜信号给倾斜伺服电机,使倾斜托架带动垂直陀螺的外框轴及航向陀螺俯仰托架转动。当转动到两个陀螺的三轴相互垂直时,垂直陀螺的转子轴与航向陀螺的外框轴在飞机横轴的铅垂面内与地垂线平行,在这个过程中,托架轴上的定子相对于壳体上的转子转动而输出倾斜角信号给指示器和测试系统;2
当飞机俯仰时,倾斜随动上的定子随壳体绕垂直陀螺外框轴上的转子转动而输出俯仰角信号:一方面给指示器和测试系统;另一方面驱动航向陀螺的俯仰托架,使垂直陀螺的转子轴与航向陀螺外框轴在飞机纵轴的铅垂面内与地垂线平行。当飞机航向改变时,俯仰托架上定子绕航向陀螺外框轴上的转子转动而输出陀螺航向信号给指示器和测试系统。2
为克服地球自转造成的纬度误差及陀螺不平衡量带来的机械误差,通过操纵台不断给航向陀螺提供方位修正信号。飞机纵横向加速时,都将产生虚假地垂线,为避免垂直陀螺去跟踪虚假地垂线,带来加速度误差,设置了纵横向切断装置。当飞机俯仰角大于17°时,因磁传感器产生错误的航向信号,因此,在俯仰托架轴上安装了17°环,当飞机俯仰角大于17°时,就切断磁航向修正信号。当飞机俯仰角大于90°时,航向及倾斜都出现了180°误差,因此,在俯仰托架轴上安装了90°换向环,当俯仰角达到90°时,使倾斜托架迅速转过180°,以适应飞机倒飞状况。2
主要组成全姿态陀螺仪全姿态陀螺仪由装在随动环内的航向陀螺和垂直陀螺组成。航向陀螺由磁感应传感器或天文罗盘修正,输出航向参考信号;垂直陀螺输出俯仰和倾侧姿态参考信号。飞机作机动飞行时,为保证全姿态正常工作垂直陀螺输出姿态角信息,通过伺服系统带动相应的随动环。因此,它既能使航向陀螺的测量轴始终保持在当地垂线方向上,从而消除其倾侧支架误差,又能使垂直陀螺的外环轴与自转轴始终保持正交,从而使垂直陀螺正常工作。
为保证全姿态陀螺仪的测量精度,航向陀螺有保持自转轴水平(与测量轴正交)的水平修正装置和按纬度补偿地球自转影响和其他因素引起方位漂移的方位修正装置。垂直陀螺有保持自转轴与当地垂线一致的垂直修正装置。此装置受盘旋切断开关的控制避免盘旋误差。为了降低支架轴承摩擦力矩对方位测量精度的影响,可以采取专门的技术措施(如旋转轴承等)。1
全姿态指示器航向姿态系统的指示装置综合显示飞机的航向角、俯仰角和倾侧角,显示部分主要由球形刻度盘、小飞机标志和刻度指标等组成。球形刻度盘上有经线和纬线。经线上有航向刻度读数,纬线上有俯仰刻度。刻度盘上半球涂成浅色,以示天空,下半球涂成深色,以示地面。上下半球之间的分界线是人工地平线。小飞机标志固定在表壳上。
全姿态陀螺仪输出的航向角、俯仰角和倾侧角信号通过全姿态指示器内的三套交流伺服系统使球形刻度盘和倾侧指标转动。飞机全姿态以小飞机标志的中点(A点)作为判读点,由相对于刻度盘经线的位置读取航向角,相对于刻度盘纬线的位置读取俯仰角;根据倾侧指标相对于壳体面板上倾侧刻度的位置读取倾侧角。此外,指示器还接受速率陀螺输出的飞机转弯速率信号,根据转弯指标相对于转弯刻度的位置判读飞机有无转弯、转弯方向和速率大小,并根据侧滑仪判读飞机有无侧滑。这个部分的工作原理与转弯倾斜仪相同。用面板上的俯仰调整旋钮可以适当调整球形刻度盘相对小飞机标志的俯仰角度。
航向姿态系统的航向角信号由全姿态陀螺仪中航向陀螺测量轴上的同步器提供,其精度约 1.5°。俯仰角信号由全姿态陀螺仪的垂直陀螺与倾侧随动环间的同步器提供,倾侧角信号由倾侧随动环与壳体之间的同步器提供。姿态角的精度在水平飞行时约为1°,机动飞行时约为2.5°。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国