

使载体在受到外界冲击时仍然能够保持相对稳定的状态。载体可以是飞机、人造卫星等大型设备,近年来也将陀螺稳定器小型化、民用化,运用于小型无人机、摄影器材等。
由于被稳定的对象(例如人造卫星)的质量往往较大,陀螺产生的陀螺力矩只能在相对短时间内起稳定作用。在航空航天使用的条件下,事实上往往达不到长时间稳定的要求。
工作原理多轴的陀螺稳定器的原理与单轴陀螺稳定器的原理类似,这里仅对单轴陀螺稳定器原理进行说明。
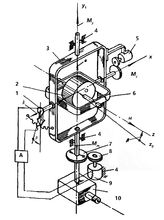
如图是一个单轴的动力陀螺稳定器,装置10为被稳定对象。起始时装置10的主轴与陀螺转子轴平行,当基座绕外环轴 转动时,转子轴和装置主轴由于陀螺的定轴性不随之转动,保持原有方向;当基座受到冲击时,转子轴与主轴做章动,仍处于原有方向附近。如果在外环轴上作用一个干扰力矩
转动时,转子轴和装置主轴由于陀螺的定轴性不随之转动,保持原有方向;当基座受到冲击时,转子轴与主轴做章动,仍处于原有方向附近。如果在外环轴上作用一个干扰力矩 ,转子与内环一起绕内环轴
,转子与内环一起绕内环轴 进动,进动的角速度为
进动,进动的角速度为 。在外力矩作用在外环轴时,转子绕内环轴做进动产生的陀螺力矩
。在外力矩作用在外环轴时,转子绕内环轴做进动产生的陀螺力矩 通过传动装置5也作用在外环轴上,并且二者大小相等方向相反,这样使得装置主轴仍处于起始位置。1
通过传动装置5也作用在外环轴上,并且二者大小相等方向相反,这样使得装置主轴仍处于起始位置。1
以上就是陀螺稳定器的基本工作原理。在此基础上再增加一个自由度,一套控制回路系统,就可以变成二轴稳定平台。如果再增加,就成为三轴稳定平台或空间稳定平台。
自动控制回路为了提高陀螺稳定器的性能,常常设计的有自动控制回路,这些控制回路分为稳定回路和修正回路,均采用负反馈调节机制。
例如在上图(单轴动力陀螺稳定器)中,减速器电机4为稳定回路,其作用是提供陀螺进动的阻尼力矩,可以使陀螺发生进动时更快地静止下来;电机5构成修正回路,与外框架固定在一起,为提高稳定精度,修正回路产生与摩擦力大小相等方向相反的力矩,以补偿摩擦力对装置的影响。
在各种稳定系统中,稳定回路的设计历来是非常重要的,往往也是复杂的,根据反馈回路的控制原理,可以将稳定器为积分陀螺组成的稳定器和微分陀螺组成的稳定器。
提升性能措施为了提高陀螺稳定器的精度,增大陀螺角动量 通常不可取,因为增大角动量需要增大整个装置的尺寸和重量。实际采用的方法是减小进动轴上的干扰力。因此,现多采用小型单自由度液浮积分陀螺、微分陀螺和挠性陀螺构成稳定器。这些陀螺的角动量很小,所产生的陀螺力矩对稳定回路来说基本没有影响,因此这种陀螺稳定器也不是严格的“动力陀螺”,陀螺在这里只起传感器或控制器的作用,它们感应角速度信号,然后由其他装置按照设计的规则姿态控制载体姿态。
通常不可取,因为增大角动量需要增大整个装置的尺寸和重量。实际采用的方法是减小进动轴上的干扰力。因此,现多采用小型单自由度液浮积分陀螺、微分陀螺和挠性陀螺构成稳定器。这些陀螺的角动量很小,所产生的陀螺力矩对稳定回路来说基本没有影响,因此这种陀螺稳定器也不是严格的“动力陀螺”,陀螺在这里只起传感器或控制器的作用,它们感应角速度信号,然后由其他装置按照设计的规则姿态控制载体姿态。
空间飞行器的稳定系统可分为被动式和主动式两种。
作用于空间飞行器的力矩是稳定系统中的陀螺所产生的,用来平滑干扰力矩,且不采用任何工体(或者燃料),这种稳定系统被称为被动式的。在这里,陀螺除了起稳定作用外,同时又是空间飞行器偏离要求的给定方位的敏感器件。
主动式空间飞行器的稳定系统是借助于机载陀螺来控制机电、流体等传动装置来实现稳定,要求消耗工体。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国