

基本原理
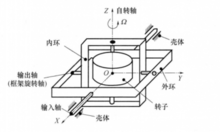 二自由度陀螺仪基本原理如右图所示,它由转子、万向环架的内环及外环所组成。转子安装在内环的轴承上,并以常值角速度Ω绕自转轴Z相对于内环高速旋转;内环通过一堆轴承和外环相连,内环可以绕内环轴Y相对于外环转动;外环又通过另一对轴承和陀螺仪的壳体相连,并且可以绕外环轴X相对于壳体转动。内环周X、外环轴 Y 及转子自转轴 Z 相互垂直,三轴相较于一点 O ,该交点为陀螺仪的固定不动点,陀螺仪的所有角运动都以某一瞬间角速度相对于固定不动点 O 而转动。1
二自由度陀螺仪基本原理如右图所示,它由转子、万向环架的内环及外环所组成。转子安装在内环的轴承上,并以常值角速度Ω绕自转轴Z相对于内环高速旋转;内环通过一堆轴承和外环相连,内环可以绕内环轴Y相对于外环转动;外环又通过另一对轴承和陀螺仪的壳体相连,并且可以绕外环轴X相对于壳体转动。内环周X、外环轴 Y 及转子自转轴 Z 相互垂直,三轴相较于一点 O ,该交点为陀螺仪的固定不动点,陀螺仪的所有角运动都以某一瞬间角速度相对于固定不动点 O 而转动。1
二自由度陀螺仪有三个自由度:一是绕自转轴OZ相对于内环的转动;二是带有转子的内环绕内环轴OY的转动;三是带有内环及转子的外环绕外环轴OX的转动,故称此类陀螺仪为二自由度陀螺仪。二自由度陀螺仪可实现OZ轴指向任意惯性空间。1
二自由度陀螺仪的取向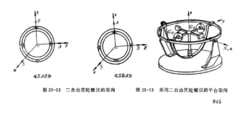 二自由度陀螺仪在应用中相当于两个积分陀螺仪,其内环轴A和外环轴B均为稳定轴,可同时提供两条正交的稳定轴线。由于二自由度陀螺仪为复合结构体,它的取向形式是有限的。通常用于稳定z轴和y轴的取向有两种(如右图):《SAB》,即自转轴S沿x轴方向,外环轴B沿z轴方向,内环轴A沿y轴方向;《SBA》,既自转轴S沿x轴方向,外环轴B沿y轴方向,内环轴A沿z轴方向。
二自由度陀螺仪在应用中相当于两个积分陀螺仪,其内环轴A和外环轴B均为稳定轴,可同时提供两条正交的稳定轴线。由于二自由度陀螺仪为复合结构体,它的取向形式是有限的。通常用于稳定z轴和y轴的取向有两种(如右图):《SAB》,即自转轴S沿x轴方向,外环轴B沿z轴方向,内环轴A沿y轴方向;《SBA》,既自转轴S沿x轴方向,外环轴B沿y轴方向,内环轴A沿z轴方向。
沿内环轴作用的干扰力矩,主要是由于陀螺组合件(内环组合件)的缺陷引起的,而沿外环轴B的干扰力矩,不仅包括内环组件缺陷引起的有害力矩,而且还包括外环构建缺陷产生的有害力矩。因此,B轴的漂移率较A轴低。在设计中,可根据具体要求确定合理的取向形式。
采用二自由度陀螺仪的惯性平台,多选用两个陀螺仪。陀螺N-《SBA》;陀螺E-《BSA》(如右图)。当利用壳体旋转法补偿陀螺漂移时,陀螺的取向为N-《SBA》,E-《SAB》。4
应用:单轴稳定器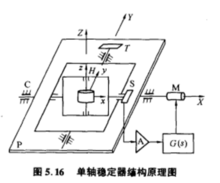 二自由度陀螺仪可用来组成单轴稳定器,右图给出了用二自由度陀螺仪作为敏感元件组成的单轴稳定器结构原理图。图中C表示飞行器载体,其上装着单轴平台P,在平台上安装一个二自由度液浮陀螺仪,用坐标系OXYZ来表示平台坐标系,对应的陀螺仪坐标系用Oxyz来表示,陀螺仪的内环轴和被稳定的平台轴平行安放,即Ox平行于OX。
二自由度陀螺仪可用来组成单轴稳定器,右图给出了用二自由度陀螺仪作为敏感元件组成的单轴稳定器结构原理图。图中C表示飞行器载体,其上装着单轴平台P,在平台上安装一个二自由度液浮陀螺仪,用坐标系OXYZ来表示平台坐标系,对应的陀螺仪坐标系用Oxyz来表示,陀螺仪的内环轴和被稳定的平台轴平行安放,即Ox平行于OX。
在陀螺的内环轴上装有信号传感器S。由于二自由度陀螺仪是相对惯性空间稳定的,因此,当平台绕OX轴有干扰力矩M存在时,平台绕OX轴相对惯性空间有转角产生,也就相当于绕陀螺的内环轴有偏差角出现,陀螺内环轴上信号传感器S就有信号输出,此信号经过平台控制器送入直流力矩电机,该力矩电机带动平台旋转,消除此偏角,或达到力矩平衡,从而保证了平台相对惯性空间绕X轴的稳定。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国