

根据结构中是否具有高速旋转转子而分为常规速率陀螺仪和非常规速率陀螺仪两大类。常规速率陀螺仪是受弹性约束的单自由度陀螺仪,可分为机械弹簧约束(如扭杆式速率陀螺仪)和电弹簧约束(如力反馈式速率陀螺仪)两种速率陀螺仪。非常规速率陀螺仪是指结构中无高速旋转的转子,但有测量运动角速度的功能,如振梁式压电晶体速率陀螺仪、振弦式速率陀螺仪以及挠性片式、磁流体式双轴速率陀螺等。2
原理微分陀螺仪,阻尼系数很小,同时只考虑载体X轴向的角速度输入,其传递函数为3 :
其中, 为进动角,
为进动角, 为陀螺转子的转动惯量,H为陀螺的角动量,
为陀螺转子的转动惯量,H为陀螺的角动量, 为载体的角速度输入,
为载体的角速度输入, 是弹性系数。
是弹性系数。
图中标注直角坐标系Oxyz,X轴沿框架轴旋转方向。Y轴称为陀螺仪的输入轴。因为微分陀螺仪就是测量它的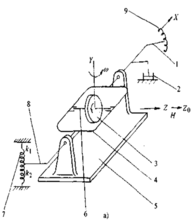 壳体绕Y轴转动的角速度W,故又称为测量轴。Z0的方向为主轴起始位置,即当W=0时,Z轴应与Z0重合。
壳体绕Y轴转动的角速度W,故又称为测量轴。Z0的方向为主轴起始位置,即当W=0时,Z轴应与Z0重合。
两根弹簧应调节得使主轴在起始位置时,弹簧作用于框架上的力矩为零。X轴称为输出轴,因为具有角速度的壳体将引起框架绕X轴转动。
当转子高速旋转时,壳体以角速度W绕Y轴转动。根据二自由度陀螺特性,将产生陀螺力矩Mg,使H以最短途径向 运动,从而将使转子轴抬头向上转动,主轴将偏离起始位置Z0轴。当框架绕X轴转动时,弹簧将产生弹性力矩My反抗陀螺力矩Mg。只有在陀螺力矩和弹性力矩以及框架转动而引起的摩擦力矩Mf相平衡时,框架停止转动。这时框架运动的角 就反映了壳体Y轴转动的角速度
就反映了壳体Y轴转动的角速度 。
。

陀螺的转子3装在框架4内,框架4支承在壳体5中,它可以绕冀轴转动。框架旋转轴的一边固定一个杠杆臂,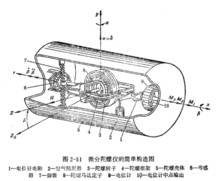 臂上装两根弹簧7,这两根弹簧的另一端固定在仪表壳体上。弹簧用来产生作用于框架上的力矩,这个力矩比例于它在任一方向偏离起始位置的偏转角,并使框架向反方向转动。框架旋转轴的另一边也有一个杠杆臂,臂端连接空气阻尼器2。图中标注了直角坐标系Oxyz,x轴沿着框架的旋转轴方向,y轴称为测量轴或称陀螺的输入轴(因为这种微分陀螺仪是用来
臂上装两根弹簧7,这两根弹簧的另一端固定在仪表壳体上。弹簧用来产生作用于框架上的力矩,这个力矩比例于它在任一方向偏离起始位置的偏转角,并使框架向反方向转动。框架旋转轴的另一边也有一个杠杆臂,臂端连接空气阻尼器2。图中标注了直角坐标系Oxyz,x轴沿着框架的旋转轴方向,y轴称为测量轴或称陀螺的输入轴(因为这种微分陀螺仪是用来
测量它的壳体绕y轴的转动角速度 的),Z0轴的方向作为陀螺主轴的起始位置,即当 =0时Z轴应与Z0轴重合。两根弹簧应调节得使主轴在起始位置时弹簟作用于框架上的力矩等于零。x轴称为陀螺仪的输出轴,因为具有角速度 的壳体将引起框架绕x轴的转动。4
的),Z0轴的方向作为陀螺主轴的起始位置,即当 =0时Z轴应与Z0轴重合。两根弹簧应调节得使主轴在起始位置时弹簟作用于框架上的力矩等于零。x轴称为陀螺仪的输出轴,因为具有角速度 的壳体将引起框架绕x轴的转动。4
它是一种绕输出轴对陀螺仪施加机械弹性约束的单自由度陀螺仪,其工作原理是:当基座以角速度 转动时,立即产生绕输出轴的陀螺力矩,并使浮子组件绕输出轴转动,与此同时,扭杆产生弹性恢复力矩。在转动动态过程的振荡效应被阻尼器吸收。在稳态时,陀螺力矩
转动时,立即产生绕输出轴的陀螺力矩,并使浮子组件绕输出轴转动,与此同时,扭杆产生弹性恢复力矩。在转动动态过程的振荡效应被阻尼器吸收。在稳态时,陀螺力矩 与弹性恢复力矩
与弹性恢复力矩 相平衡,输出转角
相平衡,输出转角 与输入角速度 成比例。2
与输入角速度 成比例。2
在自动控制飞机飞行时,为了使飞机的自振衰减,不仅要把与飞机绕其对称轴转角成比例的信号送入控制自动器,而且还要把与转动角速度及角加速度成此例的信号输入自动控制器。二自由度陀螺转速仪可以将飞机随时间变化的转角值加以微分。事实上,陀螺转速仪绕支架轴转角 的变化近似地与飞机转角
的变化近似地与飞机转角 对时间的微分成此例(这里令
对时间的微分成此例(这里令 )。如果 变化的频率此陀螺转速仪的自振频率n大得愈多,那么测量 的准确度也就愈大。因此,如果将二自由度陀螺转速仪固定在飞机上,则可以对飞机绕对称轴的转角进行微分。
)。如果 变化的频率此陀螺转速仪的自振频率n大得愈多,那么测量 的准确度也就愈大。因此,如果将二自由度陀螺转速仪固定在飞机上,则可以对飞机绕对称轴的转角进行微分。
直接固定在仪表壳体上的弹簧fB与fC来限制陀螺自由旋转,如右图所示。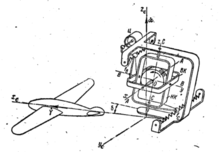 此外,外环装在内环里面是这种仪表构造上的一个特点。为了减小由于飞机绕轴Oxe振荡所引起的仪表指示误差,我们将陀螺仪的底座装成与轴Oxe。成一个角度d。
此外,外环装在内环里面是这种仪表构造上的一个特点。为了减小由于飞机绕轴Oxe振荡所引起的仪表指示误差,我们将陀螺仪的底座装成与轴Oxe。成一个角度d。
由于飞机以角速度 与
与 绕轴Oze与Oxe旋转的结果,陀螺仪的底座将以角速度
绕轴Oze与Oxe旋转的结果,陀螺仪的底座将以角速度 与
与 绕轴BB与CC旋转,陀螺的转角取决于角速度与角加速度。5
绕轴BB与CC旋转,陀螺的转角取决于角速度与角加速度。5

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国