

角速度陀螺仪是单自由度陀螺仪的一种,由单自由度陀螺、弹性元件、阻尼器和信号传感器组成。1
其中单自由度陀螺由一个框架和转子构成,用于敏感转角、角速度、角加速度等信息;弹性元件用于提供弹性约束,当陀螺仪相对壳体转动一个角度时,弹性元件就会产生和其偏转方向相反的弹性约束力矩;阻尼器用于提供粘性约束,当陀螺仪相对壳体有一个角速度时,阻尼器会产生与其转动方向相反的阻尼力矩;信号传感器用于信号的输出。
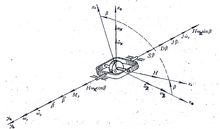
基本原理取框架坐标系为 ,壳体坐标系为
,壳体坐标系为 ,如右图所示。这两个坐标系的原点均和陀螺仪的支承中心重合,其中
,如右图所示。这两个坐标系的原点均和陀螺仪的支承中心重合,其中 轴与自传轴重合,
轴与自传轴重合, 轴为输入轴(也即敏感轴),框架轴为输出轴。
轴为输入轴(也即敏感轴),框架轴为输出轴。
设陀螺仪绕框架轴相对壳体转动的角加速度、角速度和转角分别为 、
、 和
和 ,如图中所示。设壳体绕壳体坐标系各轴相对惯性空间转动的角加速度分别为
,如图中所示。设壳体绕壳体坐标系各轴相对惯性空间转动的角加速度分别为 、
、 和
和 ,角速度分别为
,角速度分别为 、
、 和
和 。
。
当陀螺仪相对壳体转动一个角度 时,由弹性元件产生的弹性约束力矩为
 其中S为弹性约束系数。
其中S为弹性约束系数。
当陀螺仪相对壳体有一个角速度 时,由阻尼器产生的阻尼力矩为
 其中D为阻尼系数。
其中D为阻尼系数。
除弹性约束力矩和阻尼力矩外,还存在干扰力矩,用 表示。
表示。
当陀螺仪相对壳体出现角加速度 ,以及壳体绕
,以及壳体绕 轴相对惯性空间出现角加速度 时,就会沿输出轴的相对转动惯性力矩和牵连转动惯性力矩,即
轴相对惯性空间出现角加速度 时,就会沿输出轴的相对转动惯性力矩和牵连转动惯性力矩,即
 其中J为陀螺仪绕输出轴的转动惯量。
其中J为陀螺仪绕输出轴的转动惯量。
当壳体绕和轴相对惯性空间以角速度和转动时,产生沿输出轴的哥氏惯性力矩即陀螺力矩,表示如下
 其中H为陀螺动量矩。
其中H为陀螺动量矩。
由动静法可得陀螺仪绕输出轴的力矩平衡方程为
 整理后可得
整理后可得
 由于转角 很小(
由于转角 很小( ),在忽略干扰项的影响下,上式可简化为
),在忽略干扰项的影响下,上式可简化为

信号传感器输出的是电压信息,且电压大小与转角 成正比,即
将其带入上面简化后的式子可得角速度陀螺仪工作特性方程
 改写为
改写为

其中无阻尼振动固有角频率
阻尼比为
对上式进行拉氏变换,可得角速度陀螺仪的传递函数为
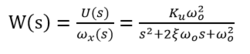
其中 。
。
由于角速度陀螺仪由弹性约束来达到平衡状态,当陀螺力矩与弹性约束力矩平衡时,即 ,故有
,故有
 因为信号传感器输出电压与转角成正比,故输出信号与输入角速度成正比,角速度陀螺仪也由此得名。2
因为信号传感器输出电压与转角成正比,故输出信号与输入角速度成正比,角速度陀螺仪也由此得名。2
角速度陀螺仪易受干扰力矩的影响,可采用滚珠轴承支承形式,弹性支承形式,液浮支承形式来减小干扰力矩。如扭杆式半液浮角速度陀螺仪,其将陀螺电机装在密封的浮子内,在浮子与壳体之间充满硅油,通过硅油的浮力来减小摩擦力矩。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国