

陀螺电机是陀螺仪的一部分,电机转子就是陀螺仪的飞轮,在高速旋转下构成陀螺仪最本质的物理性质—陀螺效应。陀螺电机在原理上与一般电机没有本质差别,但它的设计,制造精度应服从于陀螺仪的需要。转子的转动惯量比一般普通电机要大,转速高且稳定,电机抗干扰能力强,发热量小,对陀螺转子不产生附加干扰力矩,启动时间短,重复性好,结构简单等。早期的陀螺仪采用的是火药驱动,稳定性和可重复性较差,而且火药燃烧的废物对陀螺的平衡产生较大干扰,使陀螺仪产生漂移。后来采用直流有刷电机,虽然直流有刷电机转速比较容易控制,但直流有刷电机的采用电刷换相,换相过程中会有较大的接触摩擦,还会产生电火花,导致电磁干扰。后来又有人采用交流电机,这种电机虽然去掉了电刷,简化了结构,提高了可靠性和安全性,但是它的转速不好控制,稳定性不高,这在高精度陀螺仪中是不允许的。后来出现了直流无刷电机,到 20 世纪 70 年代后,由于电子技术的飞速发展,解决了高控制精度,高可靠性的直流无刷电机不能自启动的难题。因此,高精度,高可靠性,低功耗的直流无刷电机在陀螺仪中得到了广泛应用。1
永磁无刷直流电动机永磁无刷直流电动机的优点是:效率高,一般可达 90%--98%。转速稳定度高;采用闭环系统 PID 技术后,抗干扰能力强、精度高、重复性好;结构简单、工作可靠。永磁同步电动机的缺点是:电机本身无启动转矩、启动困难、有死点,必须采用电子启动电路才能顺利启动。但一经启动,它将快速达到额定、同步转速。鉴于永磁同步电动机具有上述优点,电子启动电路亦易实现,故在随机漂移小于 的框架式陀螺仪中得到了广泛的应用。
的框架式陀螺仪中得到了广泛的应用。
高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于垂直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止时可加以应用。
陀螺仪基本上就是运用物体高速旋转时,角动量很大,旋转轴会一直稳定指向一个方向的性质,所制造出来的定向仪器。不过它必需转得够快,或者惯量够大(也可以说是角动量要够大)。不然,只要一个很小的力矩,就会严重影响到它的稳定性。
用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。轴的底部被托住静止但是能够各个方向旋转。当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如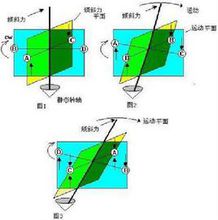 其中的子图1。因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。CD两个质点的情况也是一样的。子图2中质点A当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。AC质点的组合将导致轴在子图2所示的运动平面内运动。一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。C质点的向下运动受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。2
其中的子图1。因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。CD两个质点的情况也是一样的。子图2中质点A当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。AC质点的组合将导致轴在子图2所示的运动平面内运动。一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。C质点的向下运动受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。2
陀螺仪在工作过程中,可以通过实时测量火箭弹滚转的角度来计算火箭弹的滚转速度。最初的框架式陀螺仪采用接触电刷式角度传感器来测量火箭的姿态角及其滚转速度,但是接触摩擦力对陀螺仪的影响很大,将使陀螺仪产生较大的漂移;后来采用了霍尔角度传感器,虽然霍尔传感器基本不产生摩擦,减小了漂移,但是霍尔传感制造复杂,而且精度不高,不能准确的测出火箭的飞行姿态角以及滚转速度。现在由于单片机的出现和空间技术的发展,出现了把轴角位置转换成对应的数字代码的无接触传感器也就是光电轴角编码器。它用光电方法将轴角转换成电压信息,再经过电路处理为数字代码形式。它又分为绝对式和增量式两种编码器。其中增量式编码器是将输入轴角分为多个单位增量,敏感元件对这些增量响应。每当出现一个单位增量时,敏感元件就向计数器发出一个脉冲,计数器把这些脉冲累加起来,并以二-十进制数字码的形式再由输出端给出所需要的输入角度的瞬时信息。由于发光元件和接收元件之间没有任何摩擦,减小了陀螺仪的漂移,同时数字信号准确稳定,提高了检测的可靠性。
电动陀螺仪的发展二十世纪初,由于航海事业的兴起和北极探险的需要,促进了陀螺仪技术的发展,而且,当时异步电动机和滚珠轴承也都达到了一定的水平。安休兹于 1908 年在德国、斯派利于 1911 年在美国,先后各制成一种原理基本相同而结构不同的陀螺罗盘,用来测量轮船的航向。陀螺仪在航空上的应用比航海稍晚些。从二十年代到三十年代,在飞机上相继使用了陀螺仪转弯仪、陀螺地平仪和陀螺半罗盘,提供飞机转弯、姿态和航向指示。三十年代中期,在飞机自动驾驶仪中使用了垂直陀螺仪、航向陀螺仪和速率陀螺仪,作为飞机姿态、航向和角速度的敏感元件。从四十年代到五十年代,航空陀螺仪表向组合式方向发展,相继出现了陀螺磁罗盘、全姿态组合陀螺仪和陀螺稳定平台。六十年代以后,姿态和航向的显示从原先机械式的发展成为电子式的综合显示。如在平视显示仪中就把姿态和航向等多种信息综合在一起显示,使得飞行员能够直观、形象而迅速地判读出各种信息。
我国的惯导技术近年来已经取得了长足进步,液浮陀螺平台惯性导航系统、动力调谐陀螺四轴平台系统已相继应用于长征系列运载火箭。其他各类小型化捷联惯导、光纤陀螺惯导、激光陀螺惯导以及匹配 GPS 修正的惯导装置等也已经大量应用于战术制导武器、飞机、舰艇、运载火箭、宇宙飞船等。如漂移率 0.01°~0.02°/h 的新型激光陀螺捷联系统在新型战机上的试飞,漂移率0.05°/h 以下的光纤陀螺、捷联惯导在舰艇、潜艇上的应用,以及小型化挠性捷联惯导在各类导弹制导武器上的应用,都极大的改善了我军装备的性能。由于我国的近距攻击制导中,对陀螺仪的精度要求不像远程攻击那样高,因而采用了价格便宜的原始的框架式机械惯性陀螺仪,这种陀螺仪大多采用传统的火药驱动,也就是燃气陀螺,工作很不稳定,更为重要的是它不可测,只能是一次性使用,所以先进稳定,成本低廉,精度较高,可以重复测试的电动陀螺仪就成为我国未来短程精确制导武器的重点发展对象。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国