

通常自动控制系统只能在生产工艺正常时进行工作,一旦生产处于事故状态,控制器就要改为手动,待事故排除后,控制系统再重新投入工作。在大型生产工艺过程中,除了要求控制系统在生产处于正常状态时能够克服外界干扰,平稳操作外,还必须考虑在事故状态下也能安全生产,即当生产操作达到安全极限时,应有保护性措施。
生产保护性措施有两类:一类是硬保护措施;一类是软保护措施。所谓硬保护措施,就是当生产操作达到安全极限时,会发出声、光警报。此时由操作工将控制器切换到手动,进行手动操作处理;或是通过专门设置的连锁保护线路实现自动停车,达到保护生产的目的。对于连续生产过程来说,即使短暂的设备停车,也会造成巨大的经济损失,因此这种硬保护措施已经逐渐被软保护措施所替代。软保护措施就是通过一个特定设计的选择性控制系统,在生产短期内处于不正常情况时,生产设备不需要停车,由选择性控制系统自动改变操作方式,使参数脱离极限值,并且当参数恢复正常时,原控制系统自动恢复,避免停车,而且无需人的参与就可恢复正常生产。
要构成选择性控制,生产操作必须具有一定的选择性逻辑关系。而选择性控制的实现则需要靠具有选择功能的自动选择器(高值选择器和低值选择器)或有关的切换装置(切换器、带接点的控制器或测量装置)完成。1
选择性控制系统原理及结构选择性控制系统是把生产过程中的限制条件所构成的逻辑关系,叠加到正常的自动控制系统上去的一种组合控制方法。系统中设有两个控制器(调节器或两个以上的变送器),通过(高、低值)选择器选出能适应生产安全状况的控制信号,实现对生产过程的自动控制。正常情况下当生产过程趋近于危险极限区,但还未进入危险区时,一个用于控制不安全情况的控制方案通过高、低值选择器将取代正常生产情况下工作的控制方案(正常调节器处于开环状态),用取代调节器代替正常调节器,直至使生产过程重新恢复正常。然后,又通过选择器使原来的控制方案重新恢复工作,用正常调节器代替取代调节器。因而这种选择性控制系统又被称为自动保护系统,或称为软保护系统。
因此,设计选择性控制系统的关键环节是采用了选择器。选择器可以接在两个或多个调节器的输出端,对控制信号进行选择;或者接在几个变送器的输出端,对测量信号进行选择,以适应不同生产过程的需要。
根据选择器在系统结构中的位置不同,选择性控制系统可分为两种:
1、选择器位于调节器的输出端,对调节器输出信号进行选择的系统,如右图所示,这种选择性控制系统的主要特点是:两个调节器共用一个调节阀。在生产正常情况下,两个调节器的输出信号同时送至选择器,选出正常调节器输出的控制信号送给调节阀,实现对生产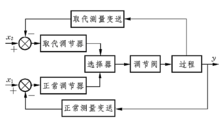 过程的自动控制。此时取代调节器处于开路状态,对系统不起控制作用。当生产不正常时,通过选择器选出取代调节器代替正常调节器对系统进行控制。此时,正常调节器处于开路状态,对系统不起控制作用。当系统的生产情况恢复正常,通过选择器的自动切换,仍由原正常调节器来控制生产的正常进行。这种选择性控制系统,在现代工业生产过程中得到了广泛应用。
过程的自动控制。此时取代调节器处于开路状态,对系统不起控制作用。当生产不正常时,通过选择器选出取代调节器代替正常调节器对系统进行控制。此时,正常调节器处于开路状态,对系统不起控制作用。当系统的生产情况恢复正常,通过选择器的自动切换,仍由原正常调节器来控制生产的正常进行。这种选择性控制系统,在现代工业生产过程中得到了广泛应用。
2、选择器位于调节器之前,对变送器输出信号进行选择的系统,如右图所示。该选择性系统的特点是几个变送器合用一个调节器。通常选择的目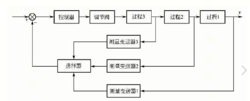 的有两个,其一是选出最高或最低测量值;其二是选出可靠测量值。如固定床反应器中,为了防止温度过高烧坏催化剂,在反应器的固定催化剂床层内的不同位置上,装设了几个温度检测点,各点温度检测信号通过高值选择器,选出其中最高的温度检测信号作为测量值,进行温度自动控制,从而保证了反应器催化剂层的安全。2
的有两个,其一是选出最高或最低测量值;其二是选出可靠测量值。如固定床反应器中,为了防止温度过高烧坏催化剂,在反应器的固定催化剂床层内的不同位置上,装设了几个温度检测点,各点温度检测信号通过高值选择器,选出其中最高的温度检测信号作为测量值,进行温度自动控制,从而保证了反应器催化剂层的安全。2
由于选择性控制系统中总有一台控制器处于开环状态,因此易产生积分饱和。防积分饱和有限幅法、外反馈法、积分切除法三种。
1、限幅法:用高低值限幅器将控制器的积分反馈信号限定在某个区域。
2、外反馈法:在控制器开环状态下,不再使它自身的信号做积分反馈,而是采用合适的外部信号作为积分反馈信号,从而也切断了积分正反馈,防止了进一步的偏差积分作用。
3、积分切除法:它是从控制器本身的线路结构上想办法,使控制器积分线路在开环情况下会暂时自动切除,仅具有比例作用,所以这类控制器称为PI-P控制器。
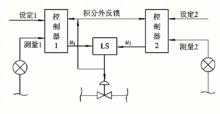 限幅法与外反馈法的防积分饱和原理不一致,功能亦有差别,在应用中应注意它们各自的适用场合。对于选择性控制系统的防积分饱和,应选择外反馈法。其积分外反馈信号取自选择器的输出信号,如右图所示。当控制器1处于工作状态时,选择器输出信号等于它自身的输出信号,而对控制器2来说,这个信号就成为外部积分反馈信号了。反之,亦相同。
限幅法与外反馈法的防积分饱和原理不一致,功能亦有差别,在应用中应注意它们各自的适用场合。对于选择性控制系统的防积分饱和,应选择外反馈法。其积分外反馈信号取自选择器的输出信号,如右图所示。当控制器1处于工作状态时,选择器输出信号等于它自身的输出信号,而对控制器2来说,这个信号就成为外部积分反馈信号了。反之,亦相同。
值得注意的是,防积分饱和要解决的问题,并非仅仅在于使开环工作的控制器输出信号不超出有效区间,而且还要求在该控制器的偏差为0的瞬间,其输出信号与当时工作的控制器输出信号相同,以便及时替换。
对于一般PI控制器,存在下式:
因此控制器1工作时,控制器2的输出算式为
式中:e2 为偏差;kc2为控制器2的比例增益;T2 为积分反馈时间常数。当e2为0,且系统处于较平稳阶段时,上述公式为:u1=u2
从而实现了跟踪。一旦偏差e2反向,控制器2的输出信号立即会被选上。显然,若在这里选用限幅法防积分饱和,则无法起到信号跟踪作用。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国