

简单系统的传递函数矩阵
一控制系统的状态空间表达式如下
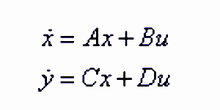
简写为(A、B、C、D)}
式中x为n维状态向量;y为q维输出向量;u为p维输入向量;A为n×n维系统矩阵;B为n×p维输入矩阵;C为q×n维输出矩阵;D为q×p维前馈矩阵。1
假定系统初始状态为0,其拉普拉斯变换后的表达式为
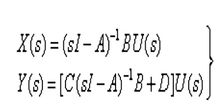
式中(sI-A)-1B称为输入-状态传递函数矩阵;C(sI-A)-1B十D称为输入-输出传递函数矩阵,简称传递函数矩阵,它是一个q×p维矩阵,它的每一个元素反映了某个输入变量对某个输出变量的传递函数。一个控制系统的传递函数矩阵是一定的,不因坐标变换而变化。
复杂系统的传递函数矩阵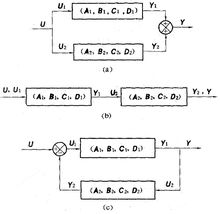 实际的控制系统往往由多个子系统组合而成,或并联,或串联,或形成反馈连接,或是它们的组合。组合系统的输入-输出传递函数矩阵可由各子系统的输入-输出传递函数矩阵组合而成。下图为基本组合系统的框图。图(a)示出两个子系统的并联,其输入-输出传递函数矩阵W(s)=W1(s)+W2(s),式中W1(s),W2(s)分别为子系统(A1,B1,C1,D1)和(A2,B2,C2,D2)的输入-输出传递函数矩阵。图(b)示出两个子系统的串联,其输入-输出传递函数矩阵为W(s)=W2(s)W1(s)。图(c)示出由反馈子系统构成的组合系统,其输入-输出传递函数矩阵为W (s)=W1 (s) [I+W2(s)W1(s)]-1或W(s)=[I+W1(s)W2(s)]-1W1(s)。
实际的控制系统往往由多个子系统组合而成,或并联,或串联,或形成反馈连接,或是它们的组合。组合系统的输入-输出传递函数矩阵可由各子系统的输入-输出传递函数矩阵组合而成。下图为基本组合系统的框图。图(a)示出两个子系统的并联,其输入-输出传递函数矩阵W(s)=W1(s)+W2(s),式中W1(s),W2(s)分别为子系统(A1,B1,C1,D1)和(A2,B2,C2,D2)的输入-输出传递函数矩阵。图(b)示出两个子系统的串联,其输入-输出传递函数矩阵为W(s)=W2(s)W1(s)。图(c)示出由反馈子系统构成的组合系统,其输入-输出传递函数矩阵为W (s)=W1 (s) [I+W2(s)W1(s)]-1或W(s)=[I+W1(s)W2(s)]-1W1(s)。
当控制系统维数不高时,可直接由adj(sI-A)/|sI-A|求得(sI-A)-1,其中|sI-A|为(sI-A)矩阵的行列式,adj(sI-A)为(sI-A)矩阵的伴随矩阵。当控制系统维数较高时,这样的方法计算过程太复杂,可用其他更简便的方法。
对许多实际系统而言,D矩阵往往是0矩阵,|sI-A|的根为系统的极点,Cadj (sI-A)B中各元素多项式的根为系统的零点。存在零点、极点相消的情况下,传递函数矩阵就不能完全描述系统的运动规律及性能,只能反映系统完全可控且完全可观测部分的情况。 2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国