

定义
运动方程是描述结构中力与位移(包括速度和加速度)关系的数学表达式。
单质点体系的运动方程:

多自由度体系的运动方程:

运动方程的建立方法运动方程建立主要由以下五种方法,以 右图的单质点体系运动为例。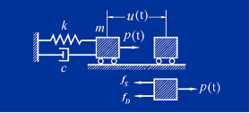
牛顿第二定律
根据单质点体系的受力分析可以直接写出该单质点体系的运动方程:
牛顿第二定律的优点:
牛顿第二定律是基于物理学中已有知识的直接应用,以人们最容易接受的力学知识建立体系的运动方程。
D’Alembert原理(直接动力平衡法)在体系运动的任一瞬时,如果除了实际作用结构的主动力(包括阻尼力)和约束反力外,再加上(假想的)惯性力,则在该时刻体系将处于假想的平衡状态(动力平衡)。
 其中,
其中, 。
。
D’Alembert原理的优点:****
静力问题是人们所熟悉的,有了D’Alembert 原理之后,形式上动力问题就变成了静力问题,静力问题中用来建立控制方程的方法,都可以用于建立动力问题的平衡方程,使对动力问题的思考有一定的简化。对很多问题,D’Alembert原理是用于建立运动方程的最直接、最简便的方法,建立了动力平衡(简称:动平衡)的概念。
虚位移原理虚位移原理:在一组外力作用下的平衡系统发生一个虚位移时,外力在虚位移上所做的虚功总和恒等于零。
虚位移是指满足体系约束条件的无限小位移。设体系发生一个虚位移du,则平衡力系在du上做的总虚功为:

其中,。
虚位移原理的优点:
虚位移原理是建立在对虚功分析的基础之上,而虚功是一个标量,可以按代数方式运算,因而比Newton第二定律,或D’Alembert原理中需要采用的矢量运算更简便。
Hamilton原理可以应用变分法(原理)建立结构体系的运动方程。在数学上,变分问题就是求泛函的极值问题。在这里,泛函就是结构体系中的能量(功)。
体系的平衡位置是体系的稳定位置,在稳定位置,体系的能量取得极值,一般是极小值。
Hamilton原理:在任意时间区段[t1, t2]内,体系的动能和位能的变分加上非保守力做功的变分等于0。

其中:
 ——体系的总动能;
——体系的总动能;
 —— 体系的位能,包括应变能及任何保守力的势能;
—— 体系的位能,包括应变能及任何保守力的势能;
 ——作用于体系上非保守力(包括阻尼力及任意外荷载)所做的功;
——作用于体系上非保守力(包括阻尼力及任意外荷载)所做的功;
 ——在指定时间段内所取的变分。
——在指定时间段内所取的变分。
Hamilton原理的优点:
不明显使用惯性力和弹性力,而分别用对动能和位能的变分代替。因而对这两项来讲,仅涉及处理纯的标量,即能量。而在虚位移中,尽管虚功本身是标量,但用来计算虚功的力和虚位移则都是矢量。
Lagrange方程Hamilton原理是一种积分形式的动力问题的变分方法,实际还有另外与之等价的微分形式的动力问题的变分原理,就是运动的Lagrange方程,其表达式如下:

其中:
—— 体系的动能;
—— 体系的位能,包括应变能及任何保守力的势能;
 ——与
——与 相应的非保守力(包括阻尼力及任意外荷载)。
相应的非保守力(包括阻尼力及任意外荷载)。
Lagrange方程的优点:
得到更多的应用,它和Hamilton原理一样,除非保守力(阻尼力)外,是一个完全的标量分析方法,不必直接分析惯性力和保守力(主要是弹性恢复力),而惯性力和弹性恢复力是建立运动方程时最为困难的处理对象。1
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国