

简介
可以使用“symplectic manifold”的任何平滑的实值函数H来定义哈密尔顿函数。 函数H被称为哈密尔顿算子或哈密尔顿能量函数。 然后将“symplectic manifold”称为相位空间。 哈密尔顿函数在辛流形上引入一个特殊的向量场,称为哈密尔顿矢量场。
哈密尔顿矢量场(特殊类型的对称矢量场)在manifold上引起哈密顿量。 这是一个单参数族的变换(曲线的参数通常称为时间);换句话说,是同义词的同位素,从本质来说。 通过刘维定理,每个辛同胚保留相位空间上的体积形式。 由哈密尔顿流引起的拟合的收集通常称为哈密尔顿算子的哈密尔顿算子。1
辛结构引起泊松支架。 泊松支架在歧管上给出了李代数的结构空间。给定函数f
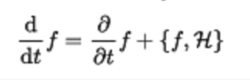
如果我们有概率分布ρ,那么(由于相空间速度(ṗi,q̇i)具有零散度,概率保守),其对流导数可以表示为零,因此
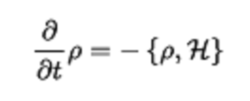
这就是刘维定理。 如果{G,H} = 0,则G保守,对称变换是对称变换。
哈密尔顿算子可能有多个守恒量Gi。 如果辛流形具有维度2n,并且存在n个函数上独立的保守量Gi,它们处于回归(即{Gi,Gj} = 0)),那么哈密顿量可以是刘维积分的。刘维-阿诺德定理2说,在本地,任何刘维可积分哈密尔顿算子都可以通过辛同胚转换成一个新的哈密尔顿算子,保守数量Gi为坐标;新的坐标称为动作角坐标。 变换的哈密尔顿算子只取决于Gi,因此运动方程具有简单的形式

对于某些功能F(阿诺德等,1988)。 整个领域的重点是与由KAM定理管理的可集成系统的小偏差。
哈密尔顿矢量场的可积分性是一个悬而未决的问题。 一般来说,哈密顿系统是混乱的;测量,完整性,可整合性和稳定性的概念定义不明确。 在这个时候,动力系统的研究主要是定性的,而不是定量科学。
相关知识广义坐标和广义动量的函数,起着系统特征函数的作用。以H表示,其定义是(公式略):其中q、q0分别是系统的广义动量和广义速度,L是系统的拉格朗日函数。在经典力学中,将哈密顿函数代入正则方程,可得到力学系统的动力学规律,并可将该函数表示为H=T2一TO+V。式中的T2和TO分别为系统动能表示式中广义速度的二次项和零次项。哈密顿函数具有能量的量纲,但不一定就是系统的机械能。通常在反映约束条件的约束方程中不合时间的情况下,哈密顿函数具有机械能的意义,表示为H=T2十V。如果哈密顿函数不含时间,它本身就是一个守恒量。如果哈密顿函数不含某个广义坐标,与这个广义坐标对应的广义动量是守恒量。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国