

定义
⒈对于一个集合D,D中任意有限个点的凸组合的全体称为D的凸包。
⒉对于一个集合D,所有包含D的凸集之交称为D的凸包。
可以证明,上述两种定义是等价的
概念
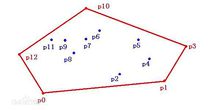
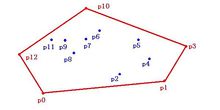 1 点集Q的凸包(convex hull)是指一个最小凸多边形,满足Q中的点或者在多边形边上或者在其内。右图中由红色线段表示的多边形就是点集Q={p0,p1,...p12}的凸包。
1 点集Q的凸包(convex hull)是指一个最小凸多边形,满足Q中的点或者在多边形边上或者在其内。右图中由红色线段表示的多边形就是点集Q={p0,p1,...p12}的凸包。
2 一组平面上的点,求一个包含所有点的最小的凸多边形,这就是凸包问题了。这可以形象地想成这样:在地上放置一些不可移动的木桩,用一根绳子把他们尽量紧地圈起来,并且为凸边形,这就是凸包了。
数学定义:设S为欧几里得空间 的任意子集。包含S的最小凸集称为S的凸包,记作conv(S)。1
的任意子集。包含S的最小凸集称为S的凸包,记作conv(S)。1
平面求法常见求法凸包最常用的凸包算法是Graham扫描法和Jarvis步进法
Graham's Scan法这个算法是由数学大师葛立恒(Graham)发明的,他曾经是美国数学学会(AMS)主席、AT&T首席科学家以及国际杂技师协会(IJA)主席。
问题
给定平面上的二维点集,求解其凸包。
过程
⒈ 在所有点中选取y坐标最小的一点H,当作基点。如果存在多个点的y坐标都为最小值,则选取x坐标最小的一点。坐标相同的点应排除。然后按照其它各点p和基点构成的向量;与x轴的夹角进行排序,夹角由大至小进行顺时针扫描,反之则进行逆时针扫描。实现中无需求得夹角,只需根据余弦定理求出向量夹角的余弦值即可。以下图为例,基点为H,根据夹角由小至大排序后依次为H,K,C,D,L,F,G,E,I,B,A,J。下面进行逆时针扫描。
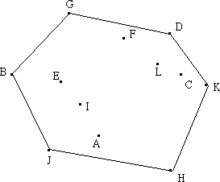
⒉ 线段;一定在凸包上,接着加入C。假设线段;也在凸包上,因为就H,K,C三点而言,它们的凸包就是由此三点所组成。但是接下来加入D时会发现,线段;才会在凸包上,所以将线段;排除,C点不可能是凸包。
⒊ 即当加入一点时,必须考虑到前面的线段是否在凸包上。从基点开始,凸包上每条相临的线段的旋转方向应该一致,并与扫描的方向相反。如果发现新加的点使得新线段与上线段的旋转方向发生变化,则可判定上一点必然不在凸包上。实现时可用向量叉积进行判断,设新加入的点为 ,上一点为
,上一点为 ,再上一点为
,再上一点为 。顺时针扫描时,如果向量
。顺时针扫描时,如果向量 与
与 的叉积为正(逆时针扫描判断是否为负),则将上一点删除。删除过程需要回溯,将之前所有叉积符号相反的点都删除,然后将新点加入凸包。
的叉积为正(逆时针扫描判断是否为负),则将上一点删除。删除过程需要回溯,将之前所有叉积符号相反的点都删除,然后将新点加入凸包。
在上图中,加入K点时,由于线段要旋转到的角度,为顺时针旋转,所以C点不在凸包上,应该删除,保留K点。接着加入D点,由于线段要旋转到的角度,为逆时针旋转,故D点保留。按照上述步骤进行扫描,直到点集中所有的点都遍历完成,即得到凸包。
复杂度
这个算法可以直接在原数据上进行运算,因此空间复杂度为O⑴。但如果将凸包的结果存储到另一数组中,则可能在代码级别进行优化。由于在扫描凸包前要进行排序,因此时间复杂度至少为快速排序的O(nlgn)。后面的扫描过程复杂度为O(n),因此整个算法的复杂度为O(nlgn)。
Jarvis步进法对于一个有三个或以上点的点集Q,过程如下:
计算点集最右边的点为凸包的顶点的起点,如上图的P3点。
Do
For i = 0 To 总顶点数
计算有向向量P3->Pi
If 其余顶点全部在有向向量P3->Pi的左侧或右侧,则Pi点为凸包的下一顶点
Pi点加入凸包列表
GoTo 1
End If
Next
Exit Do
1:
Loop
此过程执行后,点按极角自动顺时针或逆时针排序,只需要按任意两点的次序就可以了。而左侧或右侧的判断可以用前述的矢量点积性质实现。
中心法先构造一个中心点,然后将它与各点连接起来,按斜率递增的方法,求出凸包上部;再按斜率递减的方法,求出凸包下部。
水平法从最左边的点开始,按斜率递增的方法,求出凸包上部;再按斜率递减的方法,求出凸包下部。水平法较中心法减少了斜率无限大的可能,减少了代码的复杂度。
快包法选择最左、最右、最上、最下的点,它们必组成一个凸四边形(或三角形)。这个四边形内的点必定不在凸包上。然后将其余的点按最接近的边分成四部分,再进行快包法(QuickHull)。
代码实例C代码一#include#include#includetypedefstruct{ doublex; doubley;}POINT;POINTresult[102];//保存凸包上的点,相当于所说的栈SPOINTa[102];intn,top;doubleDistance(POINTp1,POINTp2)//两点间的距离{ returnsqrt((p1.x-p2.x)*(p1.x-p2.x)+(p1.y-p2.y)*(p1.y-p2.y));}doubleMultiply(POINTp1,POINTp2,POINTp3)//叉积{ return((p2.x-p1.x)*(p3.y-p1.y)-(p2.y-p1.y)*(p3.x-p1.x));}intCompare(constvoid*p1,constvoid*p2)//根据p0->p1的极值和p0->p2的极值进行比较,如果极值相同则用距离长度比较{ POINT*p3,*p4; doublem; p3=(POINT*)p1; p4=(POINT*)p2; m=Multiply(a[0],*p3,*p4); if(m

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国